 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemoval and Selection: Improving RGB-Infrared Object Detection via Coarse-to-Fine Fusion
Paper and Code
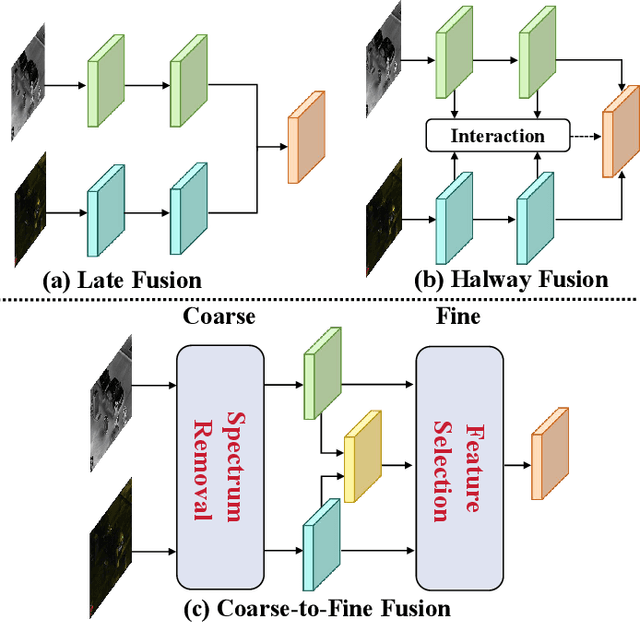



Object detection in visible (RGB) and infrared (IR) images has been widely applied in recent years. Leveraging the complementary characteristics of RGB and IR images, the object detector provides reliable and robust object localization from day to night. Existing fusion strategies directly inject RGB and IR images into convolution neural networks, leading to inferior detection performance. Since the RGB and IR features have modality-specific noise, these strategies will worsen the fused features along with the propagation. Inspired by the mechanism of human brain processing multimodal information, this work introduces a new coarse-to-fine perspective to purify and fuse two modality features. Specifically, following this perspective, we design a Redundant Spectrum Removal module to coarsely remove interfering information within each modality and a Dynamic Feature Selection module to finely select the desired features for feature fusion. To verify the effectiveness of the coarse-to-fine fusion strategy, we construct a new object detector called Removal and Selection Detector (RSDet). Extensive experiments on three RGB-IR object detection datasets verify the superior performance of our method.