Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Camera Pose Estimation Using Convolutional Neural Networks
Paper and Code

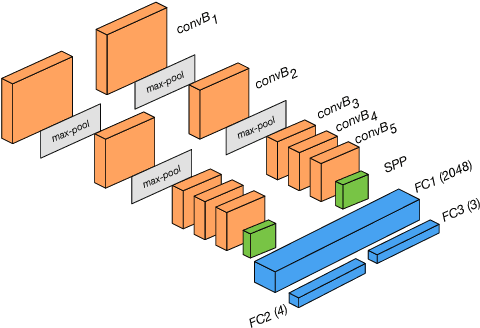

This paper presents a convolutional neural network based approach for estimating the relative pose between two cameras. The proposed network takes RGB images from both cameras as input and directly produces the relative rotation and translation as output. The system is trained in an end-to-end manner utilising transfer learning from a large scale classification dataset. The introduced approach is compared with widely used local feature based methods (SURF, ORB) and the results indicate a clear improvement over the baseline. In addition, a variant of the proposed architecture containing a spatial pyramid pooling (SPP) layer is evaluated and shown to further improve the performance.
* To be published in proceedings of Advanced Concepts for Intelligent
Vision Systems (ACIVS) 2017
View paper on