 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelationship Oriented Affordance Learning through Manipulation Graph Construction
Paper and Code
Nov 01, 2021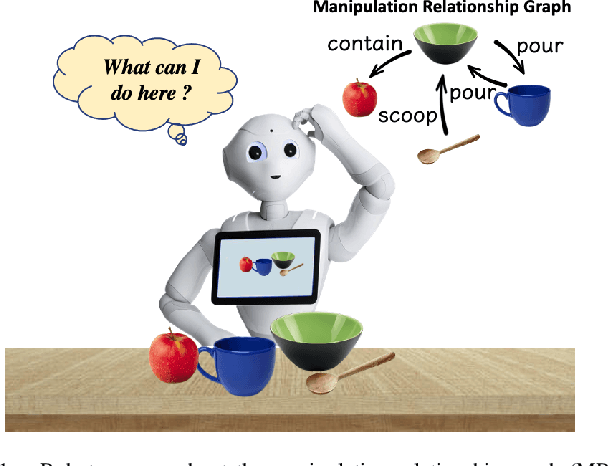
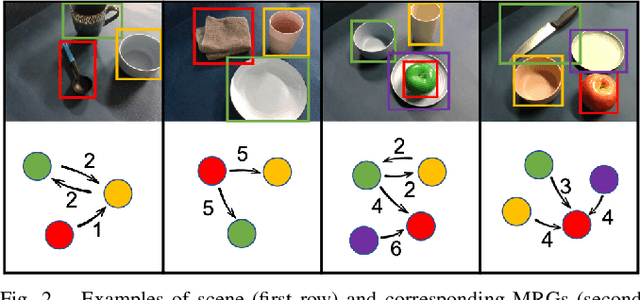
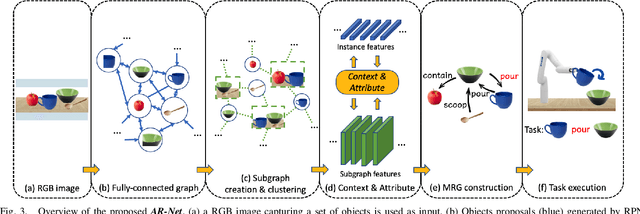
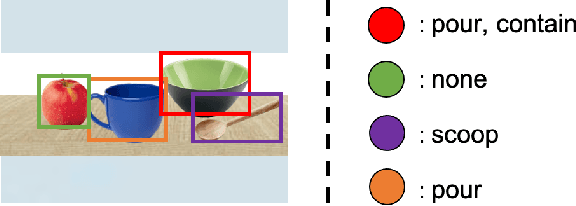
In this paper, we propose Manipulation Relationship Graph (MRG), a novel affordance representation which captures the underlying manipulation relationships of an arbitrary scene. To construct such a graph from raw visual observations, a deep nerual network named AR-Net is introduced. It consists of an Attribute module and a Context module, which guide the relationship learning at object and subgraph level respectively. We quantitatively validate our method on a novel manipulation relationship dataset named SMRD. To evaluate the performance of the proposed model and representation, both visual perception and physical manipulation experiments are conducted. Overall, AR-Net along with MRG outperforms all baselines, achieving the success rate of 88.89% on task relationship recognition (TRR) and 73.33% on task completion (TC)