 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReimagine BiSeNet for Real-Time Domain Adaptation in Semantic Segmentation
Paper and Code
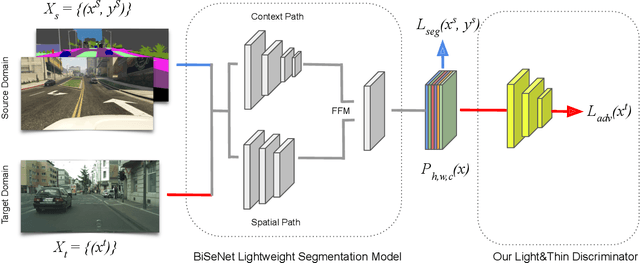



Semantic segmentation models have reached remarkable performance across various tasks. However, this performance is achieved with extremely large models, using powerful computational resources and without considering training and inference time. Real-world applications, on the other hand, necessitate models with minimal memory demands, efficient inference speed, and executable with low-resources embedded devices, such as self-driving vehicles. In this paper, we look at the challenge of real-time semantic segmentation across domains, and we train a model to act appropriately on real-world data even though it was trained on a synthetic realm. We employ a new lightweight and shallow discriminator that was specifically created for this purpose. To the best of our knowledge, we are the first to present a real-time adversarial approach for assessing the domain adaption problem in semantic segmentation. We tested our framework in the two standard protocol: GTA5 to Cityscapes and SYNTHIA to Cityscapes. Code is available at: https://github.com/taveraantonio/RTDA.