 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegion-aware Grasp Framework with Normalized Grasp Space for 6-DoF Grasping in Cluttered Scene
Paper and Code
Jun 03, 2024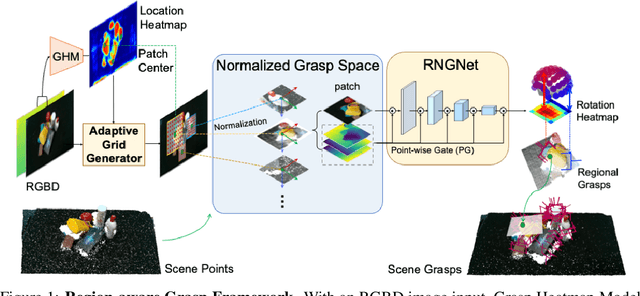
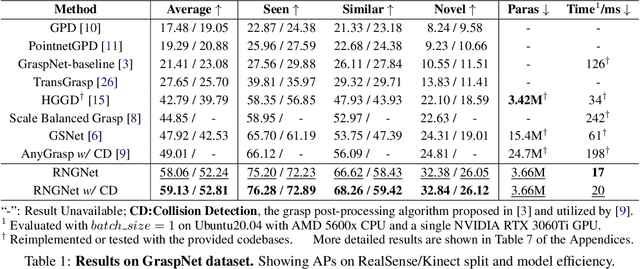
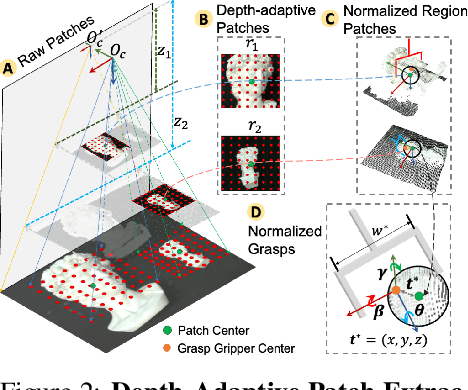

Regional geometric information is crucial for determining grasp poses. A series of region-based methods succeed in extracting regional features and enhancing grasp detection quality. However, faced with a cluttered scene with multiple objects and potential collision, the definition of the grasp-relevant region remains inconsistent among methods, and the relationship between grasps and regional spaces remains incompletely investigated. In this paper, from a novel region-aware and grasp-centric viewpoint, we propose Normalized Grasp Space (NGS), unifying the grasp representation within a normalized regional space. The relationship among the grasp widths, region scales, and gripper sizes is considered and empowers our method to generalize to grippers and scenes with different scales. Leveraging the characteristics of the NGS, we find that 2D CNNs are surprisingly underestimated for complicated 6-DoF grasp detection tasks in clutter scenes and build a highly efficient Region-aware Normalized Grasp Network (RNGNet). Experiments conducted on the public benchmark show that our method achieves the best grasp detection results compared to the previous state-of-the-arts while attaining a real-time inference speed of approximately 50 FPS. Real-world cluttered scene clearance experiments underscore the effectiveness of our method with a higher success rate than other methods. Further human-to-robot handover and moving object grasping experiments demonstrate the potential of our proposed method for closed-loop grasping in dynamic scenarios.