 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReg-NF: Efficient Registration of Implicit Surfaces within Neural Fields
Paper and Code
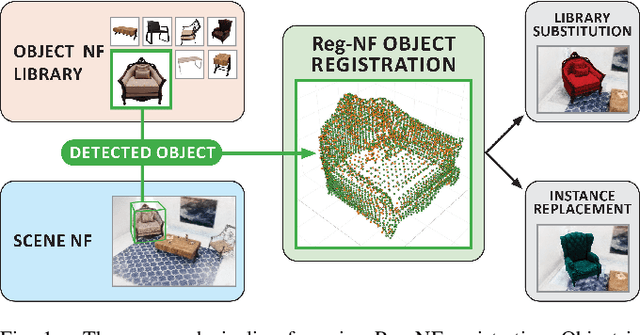
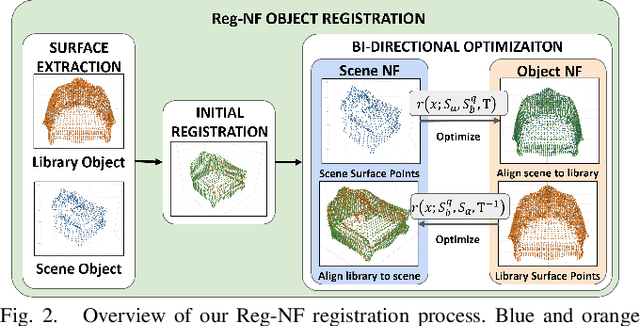
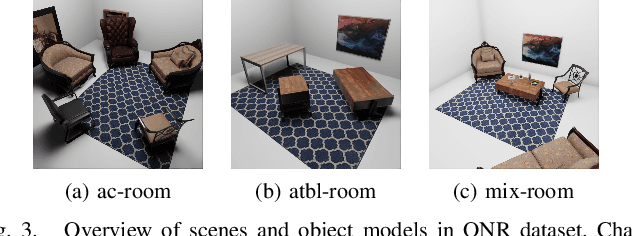
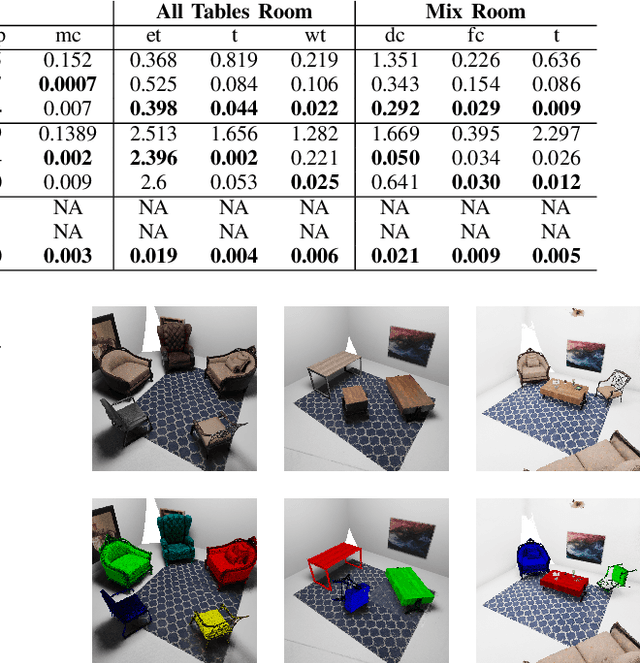
Neural fields, coordinate-based neural networks, have recently gained popularity for implicitly representing a scene. In contrast to classical methods that are based on explicit representations such as point clouds, neural fields provide a continuous scene representation able to represent 3D geometry and appearance in a way which is compact and ideal for robotics applications. However, limited prior methods have investigated registering multiple neural fields by directly utilising these continuous implicit representations. In this paper, we present Reg-NF, a neural fields-based registration that optimises for the relative 6-DoF transformation between two arbitrary neural fields, even if those two fields have different scale factors. Key components of Reg-NF include a bidirectional registration loss, multi-view surface sampling, and utilisation of volumetric signed distance functions (SDFs). We showcase our approach on a new neural field dataset for evaluating registration problems. We provide an exhaustive set of experiments and ablation studies to identify the performance of our approach, while also discussing limitations to provide future direction to the research community on open challenges in utilizing neural fields in unconstrained environments.