 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecurrent Slice Networks for 3D Segmentation of Point Clouds
Paper and Code


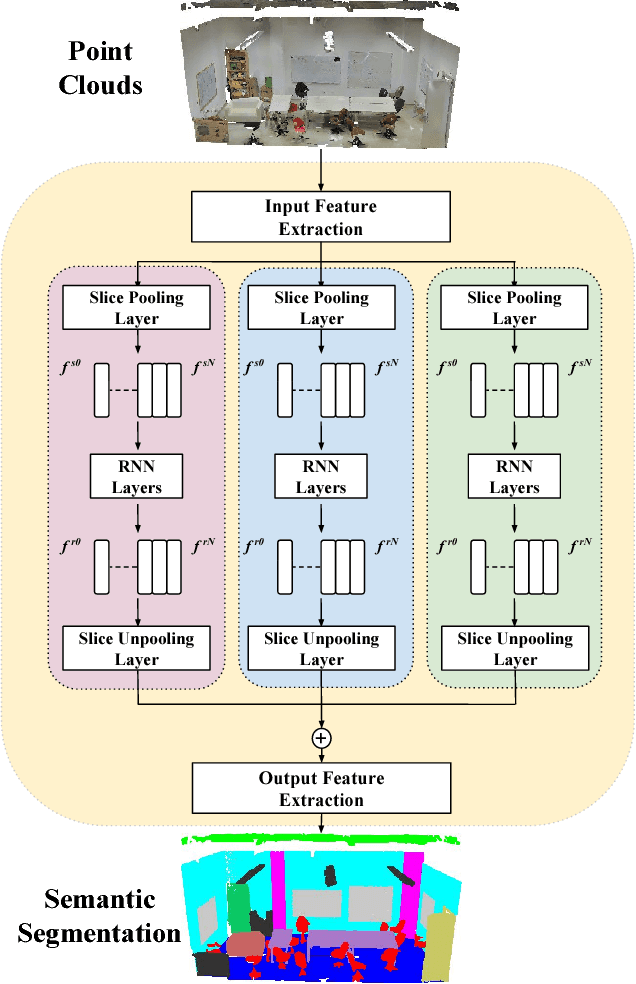
Point clouds are an efficient data format for 3D data. However, existing 3D segmentation methods for point clouds either do not model local dependencies \cite{pointnet} or require added computations \cite{kd-net,pointnet2}. This work presents a novel 3D segmentation framework, RSNet\footnote{Codes are released here https://github.com/qianguih/RSNet}, to efficiently model local structures in point clouds. The key component of the RSNet is a lightweight local dependency module. It is a combination of a novel slice pooling layer, Recurrent Neural Network (RNN) layers, and a slice unpooling layer. The slice pooling layer is designed to project features of unordered points onto an ordered sequence of feature vectors so that traditional end-to-end learning algorithms (RNNs) can be applied. The performance of RSNet is validated by comprehensive experiments on the S3DIS\cite{stanford}, ScanNet\cite{scannet}, and ShapeNet \cite{shapenet} datasets. In its simplest form, RSNets surpass all previous state-of-the-art methods on these benchmarks. And comparisons against previous state-of-the-art methods \cite{pointnet, pointnet2} demonstrate the efficiency of RSNets.