 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecreating Bat Behavior on Quad-rotor UAVs-A Simulation Approach
Paper and Code
Feb 12, 2020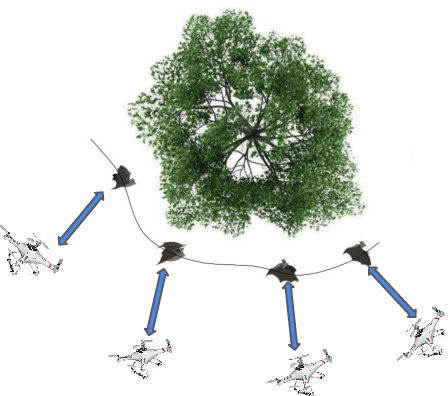
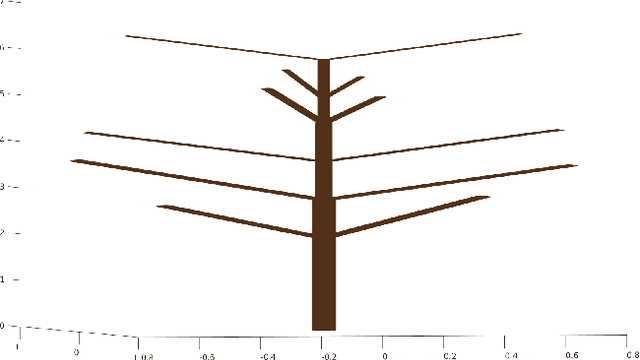
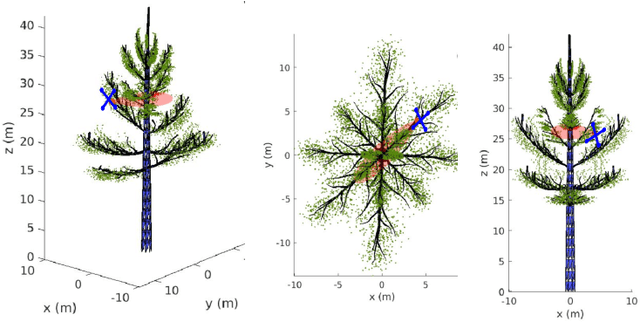
We develop an effective computer model to simulate sensing environments that consist of natural trees. The simulated environments are random and contain full geometry of the tree foliage. While this simulated model can be used as a general platform for studying the sensing mechanism of different flying species, our ultimate goal is to build bat-inspired Quad-rotor UAVs- UAVs that can recreate bat's flying behavior (e.g., obstacle avoidance, path planning) in dense vegetation. To this end, we also introduce an foliage echo simulator that can produce simulated echoes by mimicking bat's biosonar. In our current model, a few realistic model choices or assumptions are made. First, in order to create natural looking trees, the branching structures of trees are modeled by L-systems, whereas the detailed geometry of branches, sub-branches and leaves is created by randomizing a reference tree in a CAD object file. Additionally, the foliage echo simulator is simplified so that no shading effect is considered. We demonstrate our developed model by simulating real-world scenarios with multiple trees and compute the corresponding impulse responses along a Quad-rotor trajectory.