Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstruction of 3D flight trajectories from ad-hoc camera networks
Paper and Code
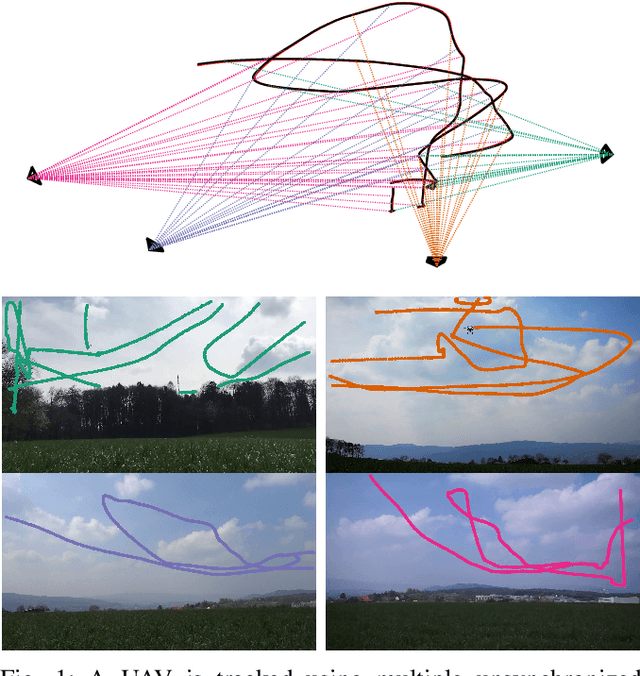


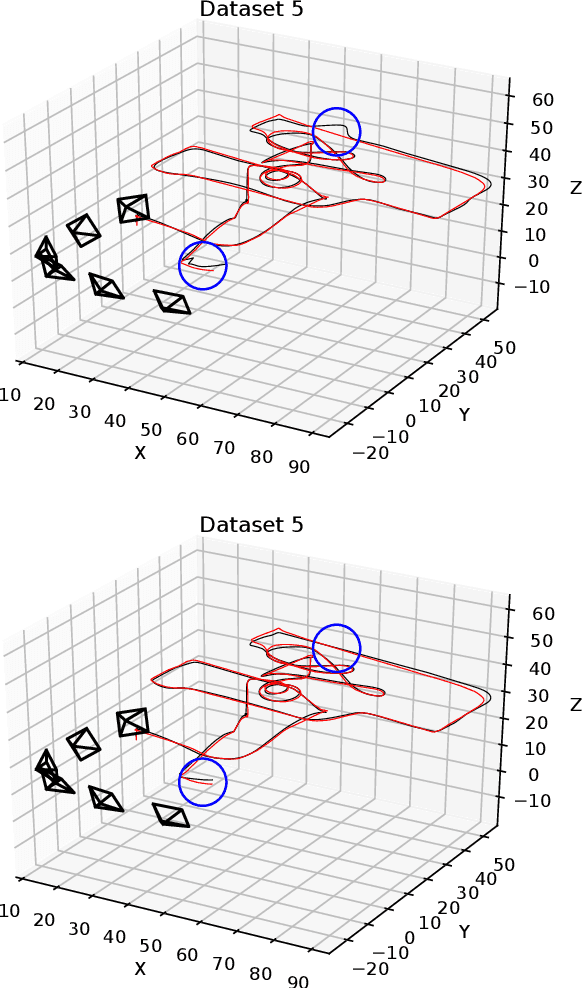
We present a method to reconstruct the 3D trajectory of an airborne robotic system only from videos recorded with cameras that are unsynchronized, may feature rolling shutter distortion, and whose viewpoints are unknown. Our approach enables robust and accurate outside-in tracking of dynamically flying targets, with cheap and easy-to-deploy equipment. We show that, in spite of the weakly constrained setting, recent developments in computer vision make it possible to reconstruct trajectories in 3D from unsynchronized, uncalibrated networks of consumer cameras, and validate the proposed method in a realistic field experiment. We make our code available along with the data, including cm-accurate ground-truth from differential GNSS navigation.
* Submitted to IROS 2020
View paper on