Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstruction Bottlenecks in Object-Centric Generative Models
Paper and Code
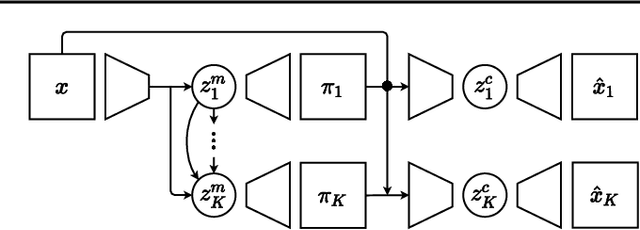
A range of methods with suitable inductive biases exist to learn interpretable object-centric representations of images without supervision. However, these are largely restricted to visually simple images; robust object discovery in real-world sensory datasets remains elusive. To increase the understanding of such inductive biases, we empirically investigate the role of "reconstruction bottlenecks" for scene decomposition in GENESIS, a recent VAE-based model. We show such bottlenecks determine reconstruction and segmentation quality and critically influence model behaviour.
* 10 pages, 7 Figures, Workshop on Object-Oriented Learning at ICML
2020
View paper on