 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Vehicle-to-Vehicle Communication Based Network Cooperative Control System through Distributed Database and Multimodal Perception: Demonstrated in Crossroads
Paper and Code


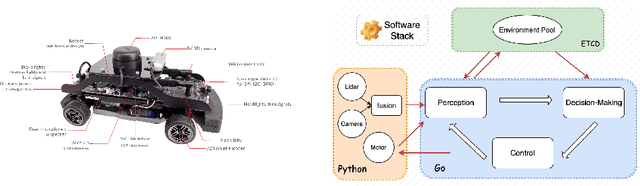
The autonomous driving industry is rapidly advancing, with Vehicle-to-Vehicle (V2V) communication systems highlighting as a key component of enhanced road safety and traffic efficiency. This paper introduces a novel Real-time Vehicle-to-Vehicle Communication Based Network Cooperative Control System (VVCCS), designed to revolutionize macro-scope traffic planning and collision avoidance in autonomous driving. Implemented on Quanser Car (Qcar) hardware platform, our system integrates the distributed databases into individual autonomous vehicles and an optional central server. We also developed a comprehensive multi-modal perception system with multi-objective tracking and radar sensing. Through a demonstration within a physical crossroad environment, our system showcases its potential to be applied in congested and complex urban environments.