 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Point Cloud Fusion of Multi-LiDAR Infrastructure Sensor Setups with Unknown Spatial Location and Orientation
Paper and Code
Jul 28, 2020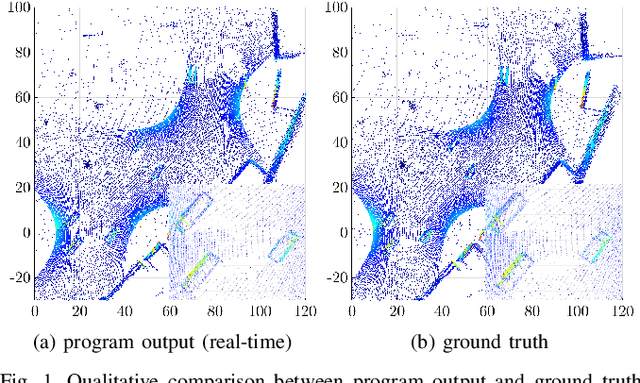
The use of infrastructure sensor technology for traffic detection has already been proven several times. However, extrinsic sensor calibration is still a challenge for the operator. While previous approaches are unable to calibrate the sensors without the use of reference objects in the sensor field of view (FOV), we present an algorithm that is completely detached from external assistance and runs fully automatically. Our method focuses on the high-precision fusion of LiDAR point clouds and is evaluated in simulation as well as on real measurements. We set the LiDARs in a continuous pendulum motion in order to simulate real-world operation as closely as possible and to increase the demands on the algorithm. However, it does not receive any information about the initial spatial location and orientation of the LiDARs throughout the entire measurement period. Experiments in simulation as well as with real measurements have shown that our algorithm performs a continuous point cloud registration of up to four 64-layer LiDARs in real-time. The averaged resulting translational error is within a few centimeters and the averaged error in rotation is below 0.15 degrees.