 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time, Highly Accurate Robotic Grasp Detection using Fully Convolutional Neural Networks with High-Resolution Images
Paper and Code
Sep 16, 2018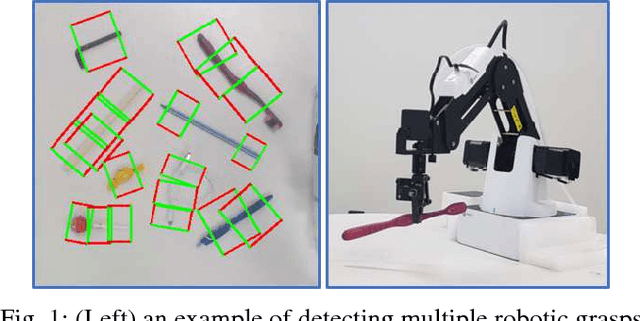
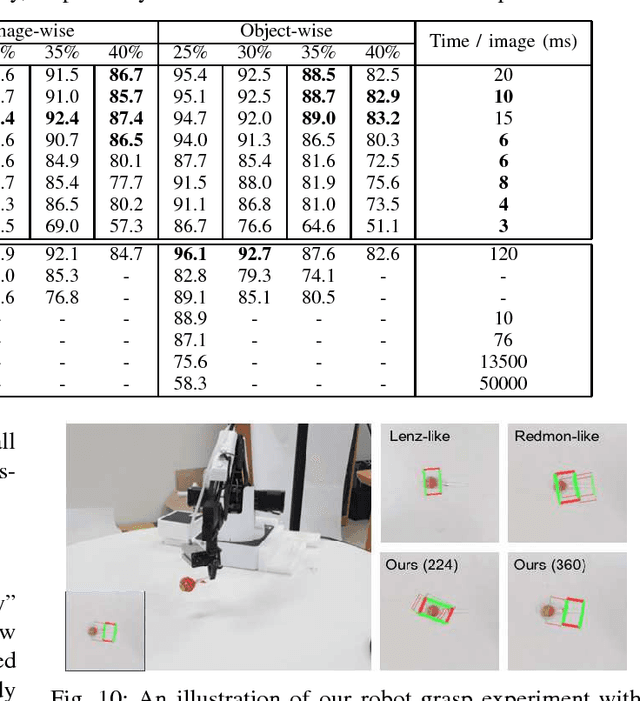
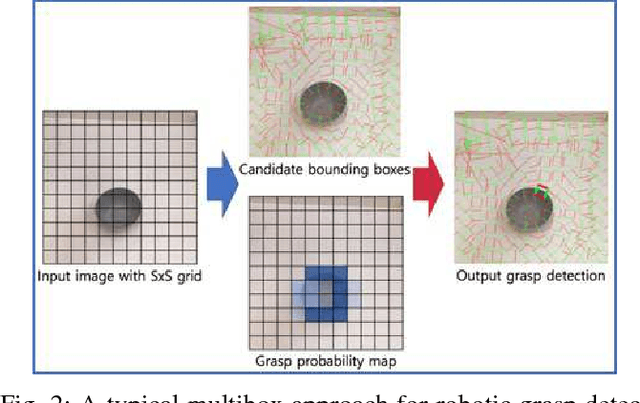
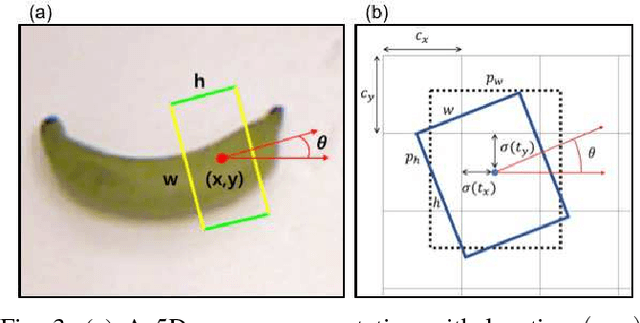
Robotic grasp detection for novel objects is a challenging task, but for the last few years, deep learning based approaches have achieved remarkable performance improvements, up to 96.1% accuracy, with RGB-D data. In this paper, we propose fully convolutional neural network (FCNN) based methods for robotic grasp detection. Our methods also achieved state-of-the-art detection accuracy (up to 96.6%) with state-of- the-art real-time computation time for high-resolution images (6-20ms per 360x360 image) on Cornell dataset. Due to FCNN, our proposed method can be applied to images with any size for detecting multigrasps on multiobjects. Proposed methods were evaluated using 4-axis robot arm with small parallel gripper and RGB-D camera for grasping challenging small, novel objects. With accurate vision-robot coordinate calibration through our proposed learning-based, fully automatic approach, our proposed method yielded 90% success rate.