 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Grasp Pose Estimation for Novel Objects in Densely Cluttered Environment
Paper and Code
Jan 03, 2020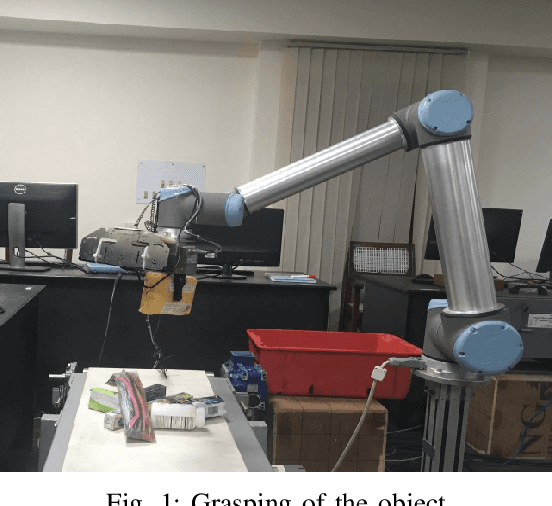
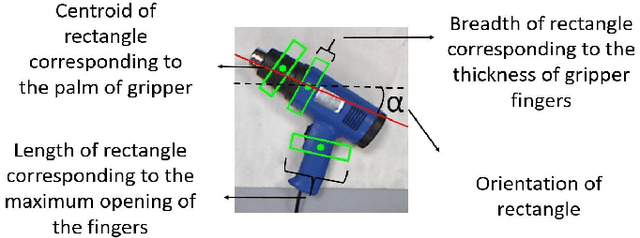
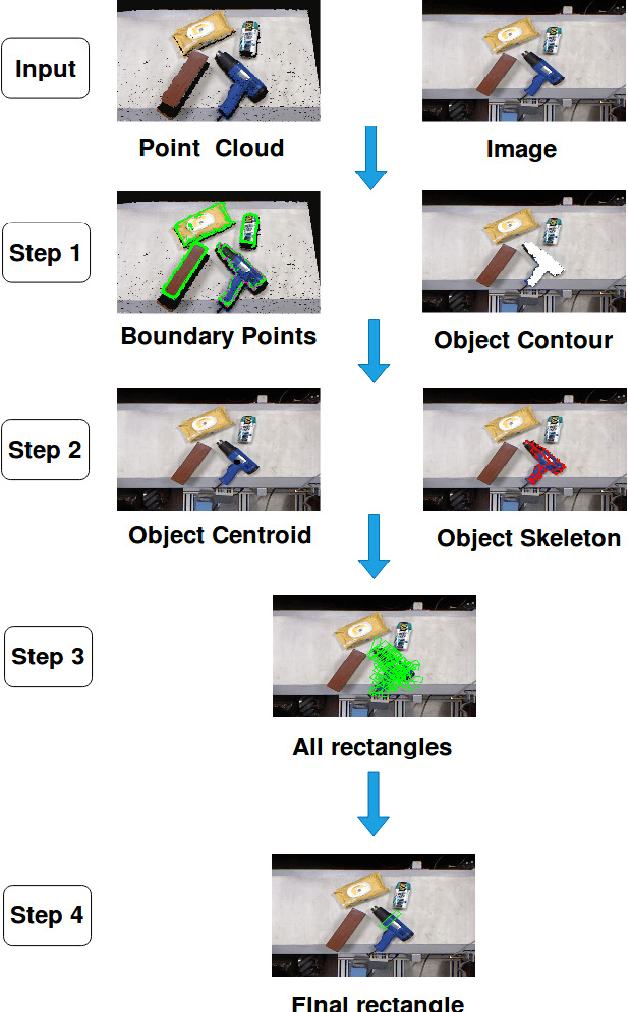
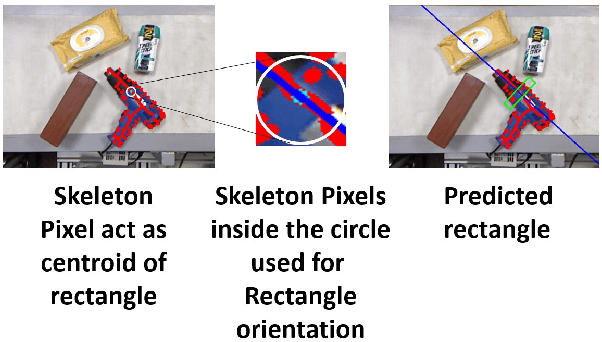
Grasping of novel objects in pick and place applications is a fundamental and challenging problem in robotics, specifically for complex-shaped objects. It is observed that the well-known strategies like \textit{i}) grasping from the centroid of object and \textit{ii}) grasping along the major axis of the object often fails for complex-shaped objects. In this paper, a real-time grasp pose estimation strategy for novel objects in robotic pick and place applications is proposed. The proposed technique estimates the object contour in the point cloud and predicts the grasp pose along with the object skeleton in the image plane. The technique is tested for the objects like ball container, hand weight, tennis ball and even for complex shape objects like blower (non-convex shape). It is observed that the proposed strategy performs very well for complex shaped objects and predicts the valid grasp configurations in comparison with the above strategies. The experimental validation of the proposed grasping technique is tested in two scenarios, when the objects are placed distinctly and when the objects are placed in dense clutter. A grasp accuracy of 88.16\% and 77.03\% respectively are reported. All the experiments are performed with a real UR10 robot manipulator along with WSG-50 two-finger gripper for grasping of objects.