Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRational Motions with Generic Trajectories of Low Degree
Paper and Code
Jul 26, 2019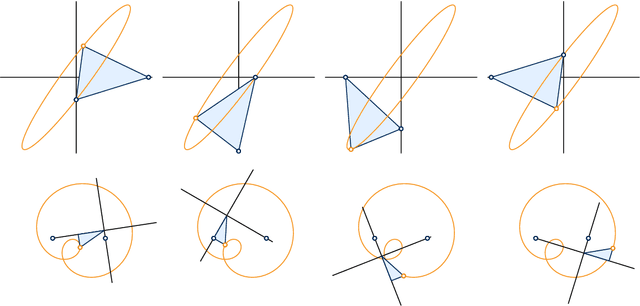
The trajectories of a rational motion given by a polynomial of degree n in the dual quaternion model of rigid body displacements are generically of degree 2n. In this article we study those exceptional motions whose trajectory degree is lower. An algebraic criterion for this drop of degree is existence of certain right factors, a geometric criterion involves one of two families of rulings on an invariant quadric. Our characterizations allow the systematic construction of rational motions with exceptional degree reduction and explain why the trajectory degrees of a rational motion and its inverse motion can be different.
View paper on