 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar-based Feature Design and Multiclass Classification for Road User Recognition
Paper and Code
May 27, 2019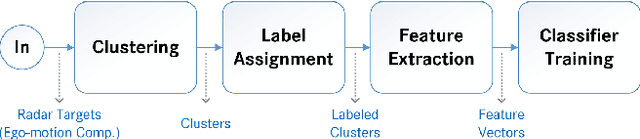
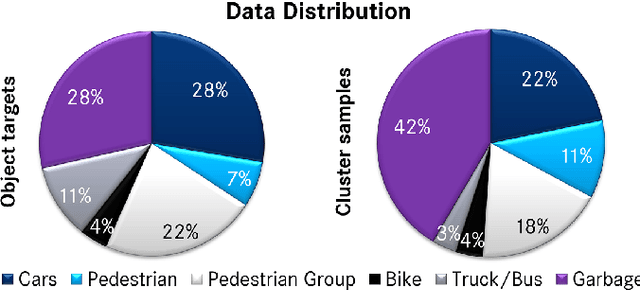
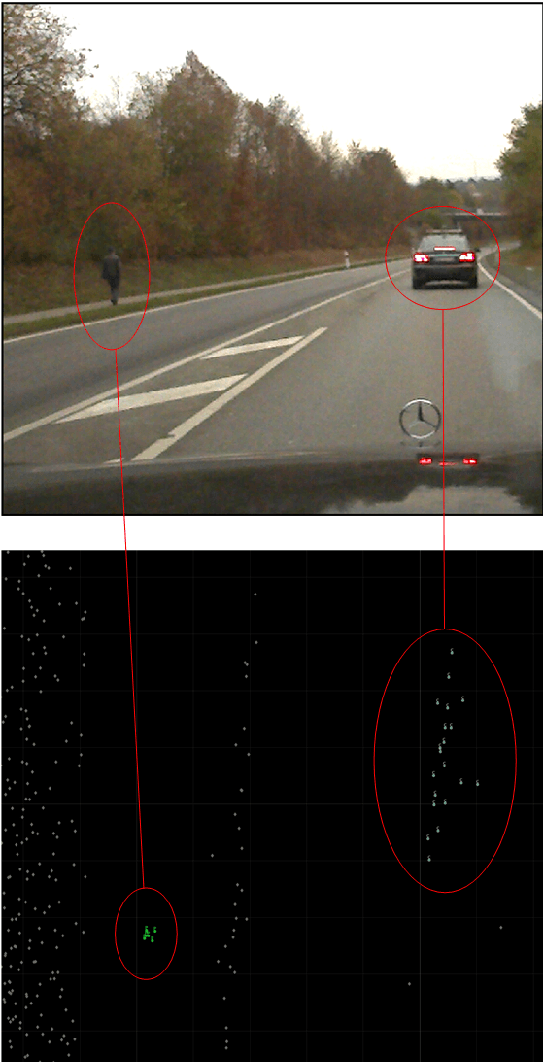
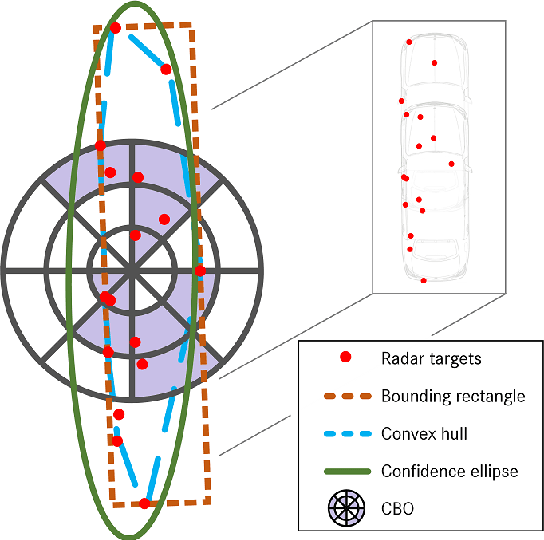
The classification of individual traffic participants is a complex task, especially for challenging scenarios with multiple road users or under bad weather conditions. Radar sensors provide an - with respect to well established camera systems - orthogonal way of measuring such scenes. In order to gain accurate classification results, 50 different features are extracted from the measurement data and tested on their performance. From these features a suitable subset is chosen and passed to random forest and long short-term memory (LSTM) classifiers to obtain class predictions for the radar input. Moreover, it is shown why data imbalance is an inherent problem in automotive radar classification when the dataset is not sufficiently large. To overcome this issue, classifier binarization is used among other techniques in order to better account for underrepresented classes. A new method to couple the resulting probabilities is proposed and compared to others with great success. Final results show substantial improvements when compared to ordinary multiclass classification