 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRADACS: Towards Higher-Order Reasoning using Action Recognition in Autonomous Vehicles
Paper and Code
Sep 28, 2022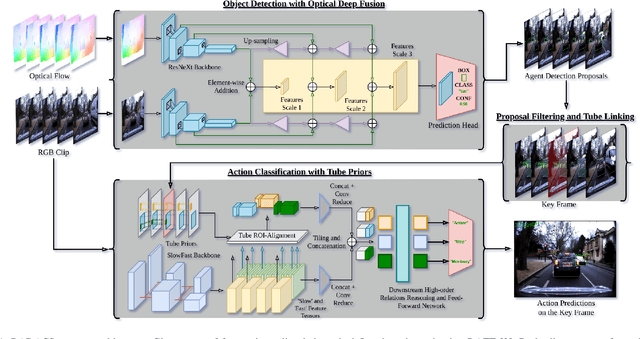
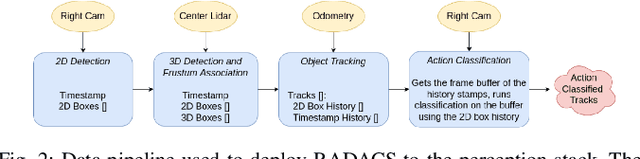
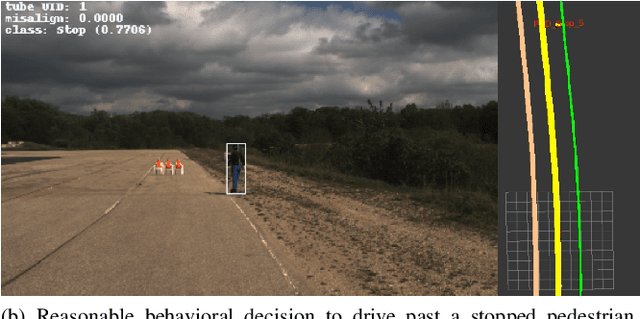
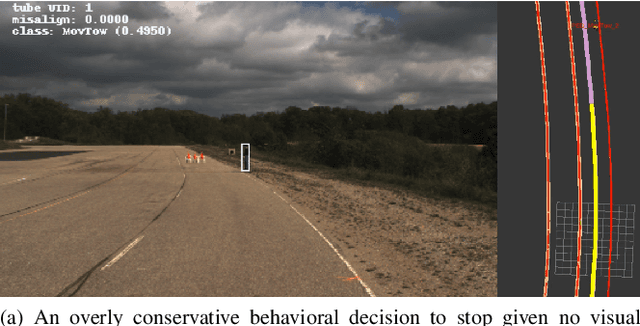
When applied to autonomous vehicle settings, action recognition can help enrich an environment model's understanding of the world and improve plans for future action. Towards these improvements in autonomous vehicle decision-making, we propose in this work a novel two-stage online action recognition system, termed RADACS. RADACS formulates the problem of active agent detection and adapts ideas about actor-context relations from human activity recognition in a straightforward two-stage pipeline for action detection and classification. We show that our proposed scheme can outperform the baseline on the ICCV2021 Road Challenge dataset and by deploying it on a real vehicle platform, we demonstrate how a higher-order understanding of agent actions in an environment can improve decisions on a real autonomous vehicle.