 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR-PCC: A Baseline for Range Image-based Point Cloud Compression
Paper and Code
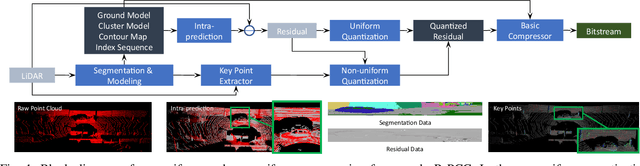
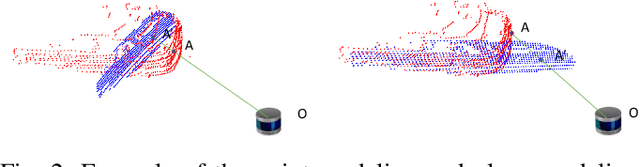

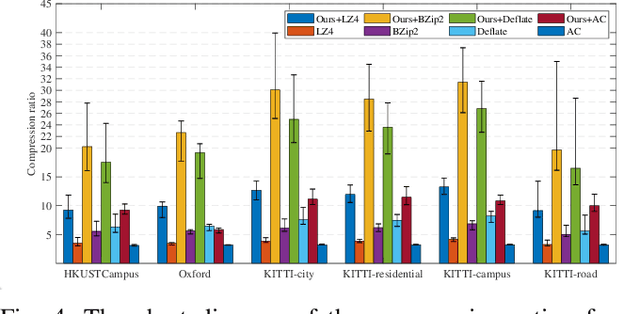
In autonomous vehicles or robots, point clouds from LiDAR can provide accurate depth information of objects compared with 2D images, but they also suffer a large volume of data, which is inconvenient for data storage or transmission. In this paper, we propose a Range image-based Point Cloud Compression method, R-PCC, which can reconstruct the point cloud with uniform or non-uniform accuracy loss. We segment the original large-scale point cloud into small and compact regions for spatial redundancy and salient region classification. Compared with other voxel-based or image-based compression methods, our method can keep and align all points from the original point cloud in the reconstructed point cloud. It can also control the maximum reconstruction error for each point through a quantization module. In the experiments, we prove that our easier FPS-based segmentation method can achieve better performance than instance-based segmentation methods such as DBSCAN. To verify the advantages of our proposed method, we evaluate the reconstruction quality and fidelity for 3D object detection and SLAM, as the downstream tasks. The experimental results show that our elegant framework can achieve 30$\times$ compression ratio without affecting downstream tasks, and our non-uniform compression framework shows a great improvement on the downstream tasks compared with the state-of-the-art large-scale point cloud compression methods. Our real-time method is efficient and effective enough to act as a baseline for range image-based point cloud compression. The code is available on https://github.com/StevenWang30/R-PCC.git.