Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantized deep learning models on low-power edge devices for robotic systems
Paper and Code
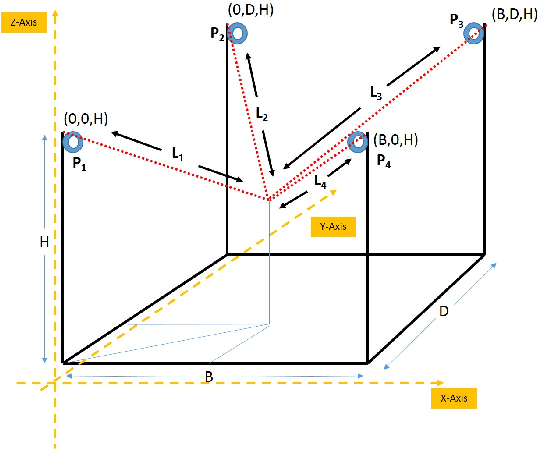
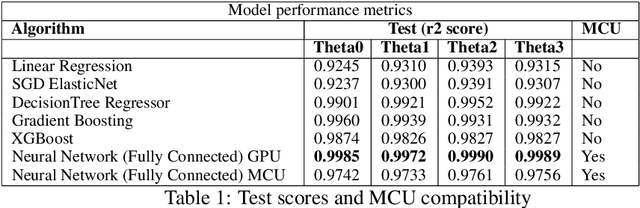
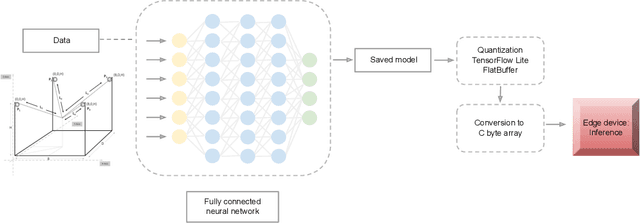
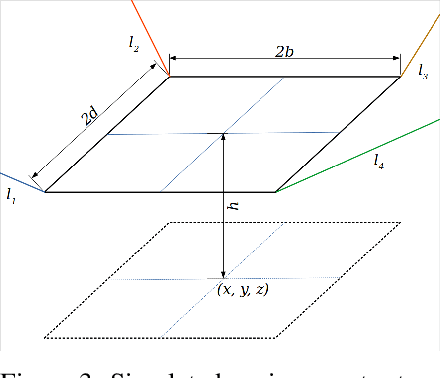
In this work, we present a quantized deep neural network deployed on a low-power edge device, inferring learned motor-movements of a suspended robot in a defined space. This serves as the fundamental building block for the original setup, a robotic system for farms or greenhouses aimed at a wide range of agricultural tasks. Deep learning on edge devices and its implications could have a substantial impact on farming systems in the developing world, leading not only to sustainable food production and income, but also increased data privacy and autonomy.
* Presented at NeurIPS 2019 Workshop on Machine Learning for the
Developing World
View paper on