 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePurely Geometric Scene Association and Retrieval - A Case for Macro Scale 3D Geometry
Paper and Code
Aug 03, 2018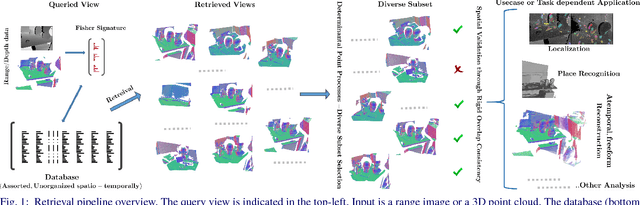
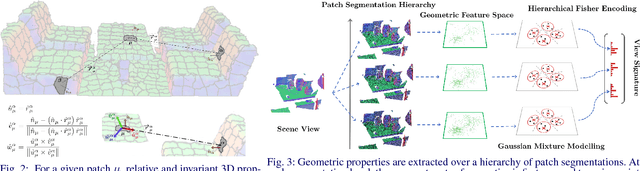
We address the problems of measuring geometric similarity between 3D scenes, represented through point clouds or range data frames, and associating them. Our approach leverages macro-scale 3D structural geometry - the relative configuration of arbitrary surfaces and relationships among structures that are potentially far apart. We express such discriminative information in a viewpoint-invariant feature space. These are subsequently encoded in a frame-level signature that can be utilized to measure geometric similarity. Such a characterization is robust to noise, incomplete and partially overlapping data besides viewpoint changes. We show how it can be employed to select a diverse set of data frames which have structurally similar content, and how to validate whether views with similar geometric content are from the same scene. The problem is formulated as one of general purpose retrieval from an unannotated, spatio-temporally unordered database. Empirical analysis indicates that the presented approach thoroughly outperforms baselines on depth / range data. Its depth-only performance is competitive with state-of-the-art approaches with RGB or RGB-D inputs, including ones based on deep learning. Experiments show retrieval performance to hold up well with much sparser databases, which is indicative of the approach's robustness. The approach generalized well - it did not require dataset specific training, and scaled up in our experiments. Finally, we also demonstrate how geometrically diverse selection of views can result in richer 3D reconstructions.