 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePSSNet: Planarity-sensible Semantic Segmentation of Large-scale Urban Meshes
Paper and Code
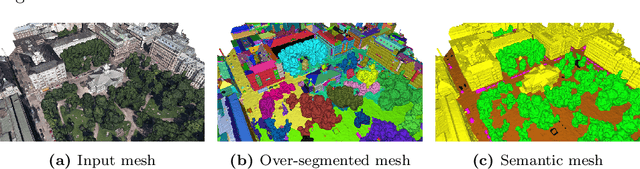

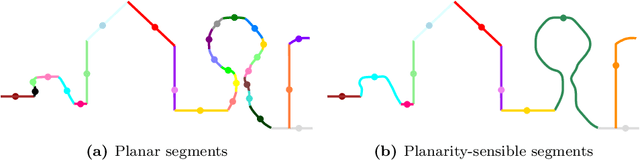
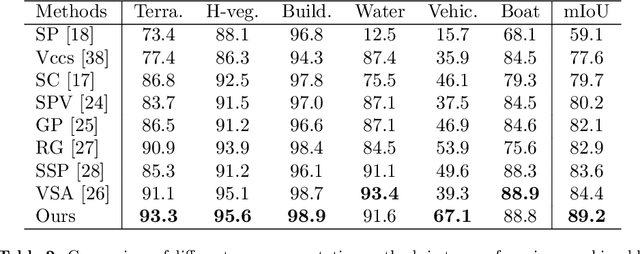
We introduce a novel deep learning-based framework to interpret 3D urban scenes represented as textured meshes. Based on the observation that object boundaries typically align with the boundaries of planar regions, our framework achieves semantic segmentation in two steps: planarity-sensible over-segmentation followed by semantic classification. The over-segmentation step generates an initial set of mesh segments that capture the planar and non-planar regions of urban scenes. In the subsequent classification step, we construct a graph that encodes geometric and photometric features of the segments in its nodes and multi-scale contextual features in its edges. The final semantic segmentation is obtained by classifying the segments using a graph convolutional network. Experiments and comparisons on a large semantic urban mesh benchmark demonstrate that our approach outperforms the state-of-the-art methods in terms of boundary quality and mean IoU (intersection over union). Besides, we also introduce several new metrics for evaluating mesh over-segmentation methods dedicated for semantic segmentation, and our proposed over-segmentation approach outperforms state-of-the-art methods on all metrics. Our source code will be released when the paper is accepted.