 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvable Representation Learning for Imitation Learning via Bi-level Optimization
Paper and Code
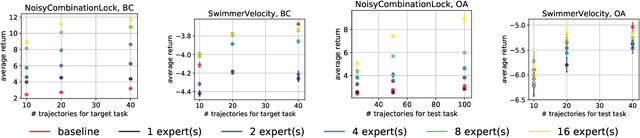

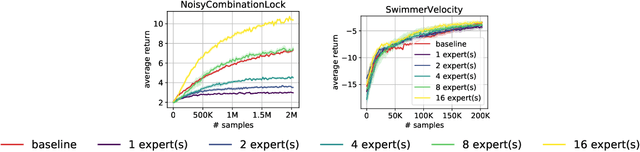
A common strategy in modern learning systems is to learn a representation that is useful for many tasks, a.k.a. representation learning. We study this strategy in the imitation learning setting for Markov decision processes (MDPs) where multiple experts' trajectories are available. We formulate representation learning as a bi-level optimization problem where the "outer" optimization tries to learn the joint representation and the "inner" optimization encodes the imitation learning setup and tries to learn task-specific parameters. We instantiate this framework for the imitation learning settings of behavior cloning and observation-alone. Theoretically, we show using our framework that representation learning can provide sample complexity benefits for imitation learning in both settings. We also provide proof-of-concept experiments to verify our theory.