 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Symmetry for Improved Trajectory Forecasting
Paper and Code
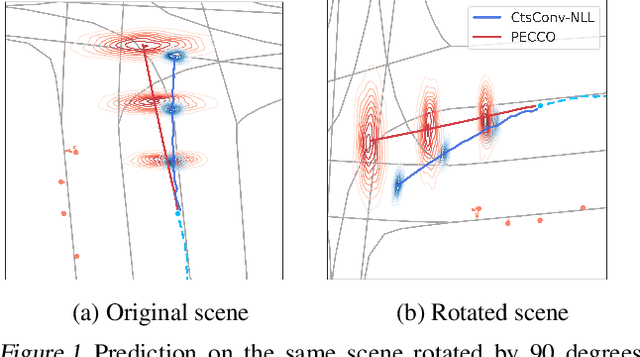
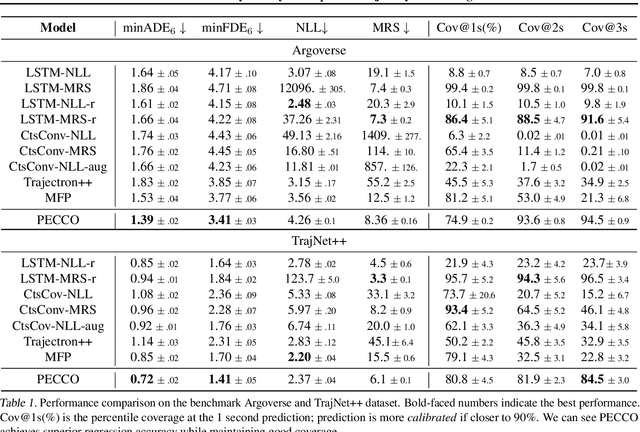
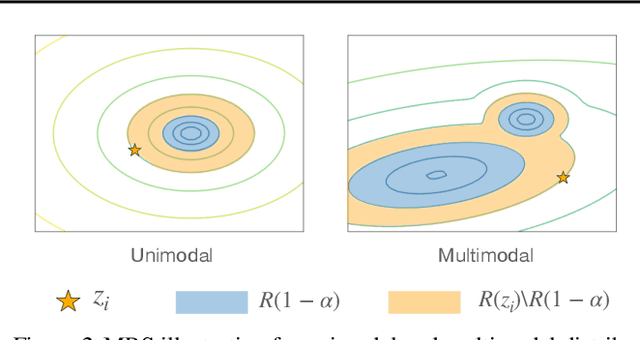

Trajectory prediction is a core AI problem with broad applications in robotics and autonomous driving. While most existing works focus on deterministic prediction, producing probabilistic forecasts to quantify prediction uncertainty is critical for downstream decision-making tasks such as risk assessment, motion planning, and safety guarantees. We introduce a new metric, mean regional score (MRS), to evaluate the quality of probabilistic trajectory forecasts. We propose a novel probabilistic trajectory prediction model, Probabilistic Equivariant Continuous COnvolution (PECCO) and show that leveraging symmetry, specifically rotation equivariance, can improve the predictions' accuracy as well as coverage. On both vehicle and pedestrian datasets, PECCO shows state-of-the-art prediction performance and improved calibration compared to baselines.