 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRO-MIND: Proximity and Reactivity Optimisation of robot Motion to tune safety limits, human stress, and productivity in INDustrial settings
Paper and Code
Sep 10, 2024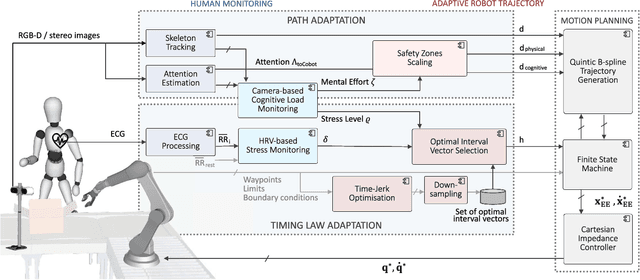

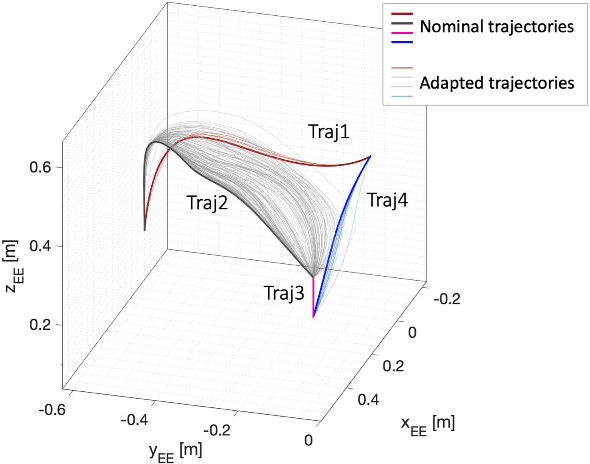

Despite impressive advancements of industrial collaborative robots, their potential remains largely untapped due to the difficulty in balancing human safety and comfort with fast production constraints. To help address this challenge, we present PRO-MIND, a novel human-in-the-loop framework that leverages valuable data about the human co-worker to optimise robot trajectories. By estimating human attention and mental effort, our method dynamically adjusts safety zones and enables on-the-fly alterations of the robot path to enhance human comfort and optimal stopping conditions. Moreover, we formulate a multi-objective optimisation to adapt the robot's trajectory execution time and smoothness based on the current human psycho-physical stress, estimated from heart rate variability and frantic movements. These adaptations exploit the properties of B-spline curves to preserve continuity and smoothness, which are crucial factors in improving motion predictability and comfort. Evaluation in two realistic case studies showcases the framework's ability to restrain the operators' workload and stress and to ensure their safety while enhancing human-robot productivity. Further strengths of PRO-MIND include its adaptability to each individual's specific needs and sensitivity to variations in attention, mental effort, and stress during task execution.