 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrivileged Sensing Scaffolds Reinforcement Learning
Paper and Code
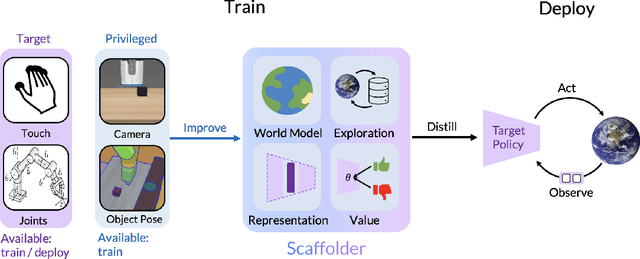
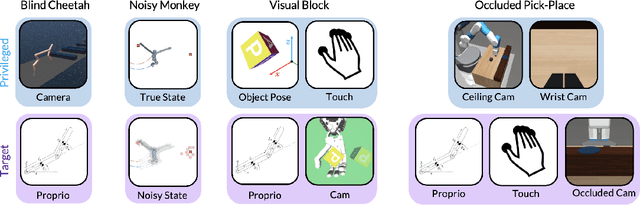
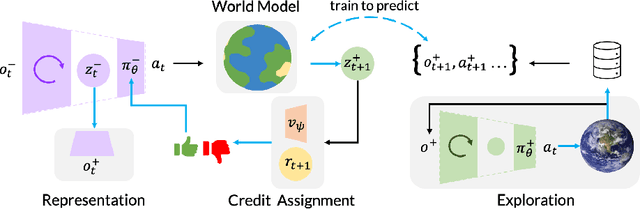

We need to look at our shoelaces as we first learn to tie them but having mastered this skill, can do it from touch alone. We call this phenomenon "sensory scaffolding": observation streams that are not needed by a master might yet aid a novice learner. We consider such sensory scaffolding setups for training artificial agents. For example, a robot arm may need to be deployed with just a low-cost, robust, general-purpose camera; yet its performance may improve by having privileged training-time-only access to informative albeit expensive and unwieldy motion capture rigs or fragile tactile sensors. For these settings, we propose "Scaffolder", a reinforcement learning approach which effectively exploits privileged sensing in critics, world models, reward estimators, and other such auxiliary components that are only used at training time, to improve the target policy. For evaluating sensory scaffolding agents, we design a new "S3" suite of ten diverse simulated robotic tasks that explore a wide range of practical sensor setups. Agents must use privileged camera sensing to train blind hurdlers, privileged active visual perception to help robot arms overcome visual occlusions, privileged touch sensors to train robot hands, and more. Scaffolder easily outperforms relevant prior baselines and frequently performs comparably even to policies that have test-time access to the privileged sensors. Website: https://penn-pal-lab.github.io/scaffolder/