 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolyRoom: Room-aware Transformer for Floorplan Reconstruction
Paper and Code
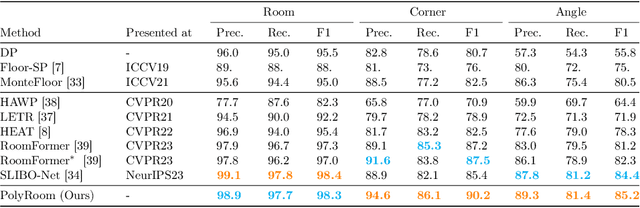
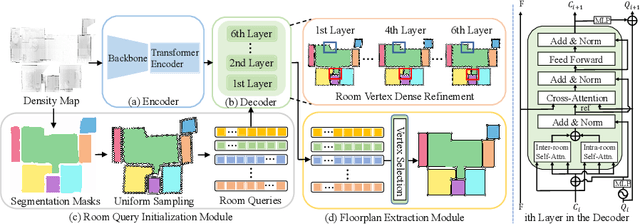
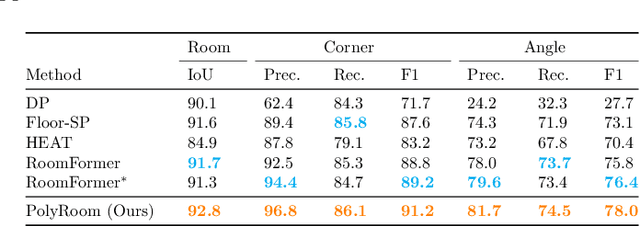

Reconstructing geometry and topology structures from raw unstructured data has always been an important research topic in indoor mapping research. In this paper, we aim to reconstruct the floorplan with a vectorized representation from point clouds. Despite significant advancements achieved in recent years, current methods still encounter several challenges, such as missing corners or edges, inaccuracies in corner positions or angles, self-intersecting or overlapping polygons, and potentially implausible topology. To tackle these challenges, we present PolyRoom, a room-aware Transformer that leverages uniform sampling representation, room-aware query initialization, and room-aware self-attention for floorplan reconstruction. Specifically, we adopt a uniform sampling floorplan representation to enable dense supervision during training and effective utilization of angle information. Additionally, we propose a room-aware query initialization scheme to prevent non-polygonal sequences and introduce room-aware self-attention to enhance memory efficiency and model performance. Experimental results on two widely used datasets demonstrate that PolyRoom surpasses current state-of-the-art methods both quantitatively and qualitatively. Our code is available at: https://github.com/3dv-casia/PolyRoom/.