Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolynomial Trajectory Predictions for Improved Learning Performance
Paper and Code
Jan 29, 2021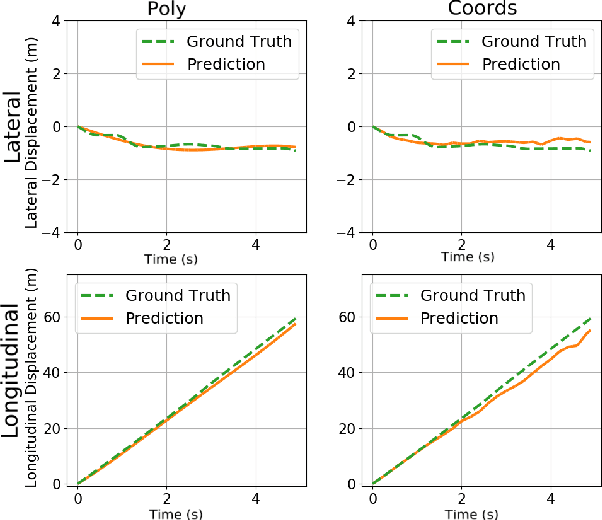
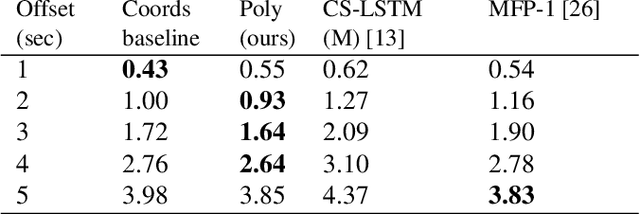
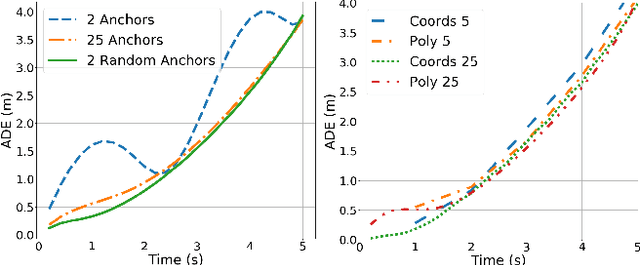
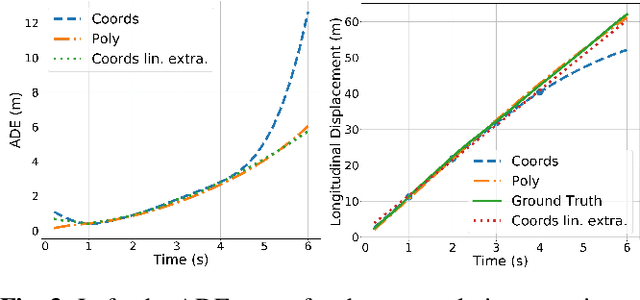
The rising demand for Active Safety systems in automotive applications stresses the need for a reliable short to mid-term trajectory prediction. Anticipating the unfolding path of road users, one can act to increase the overall safety. In this work, we propose to train artificial neural networks for movement understanding by predicting trajectories in their natural form, as a function of time. Predicting polynomial coefficients allows us to increased accuracy and improve generalisation.
* Submitted to IEEE ICIP 2021
View paper on