 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy Transfer via Enhanced Action Space
Paper and Code
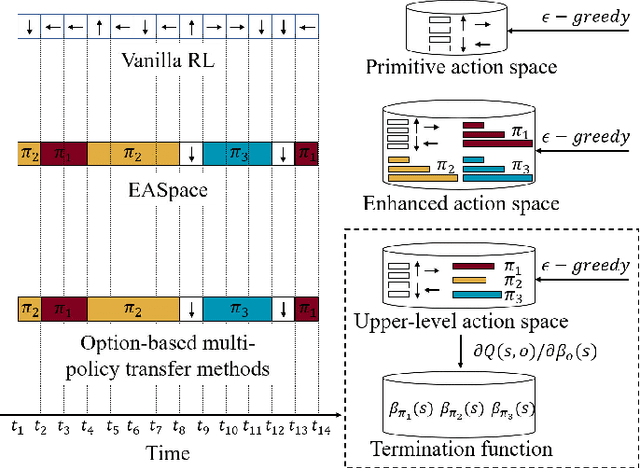
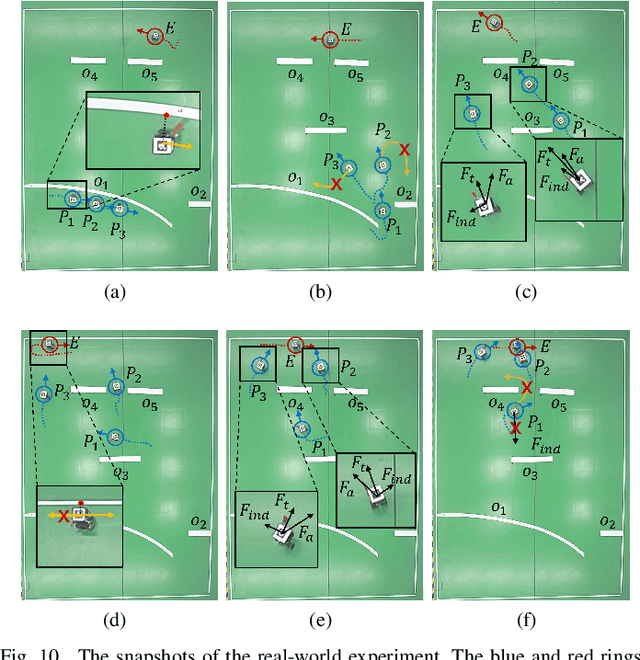
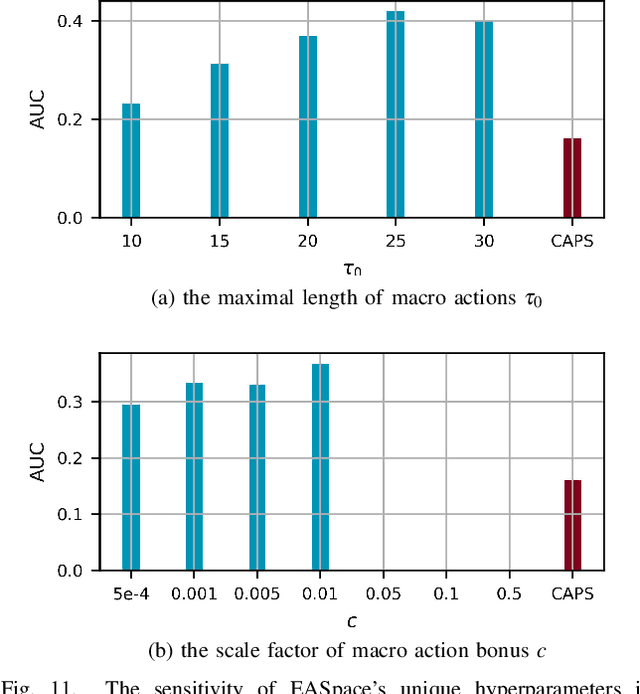
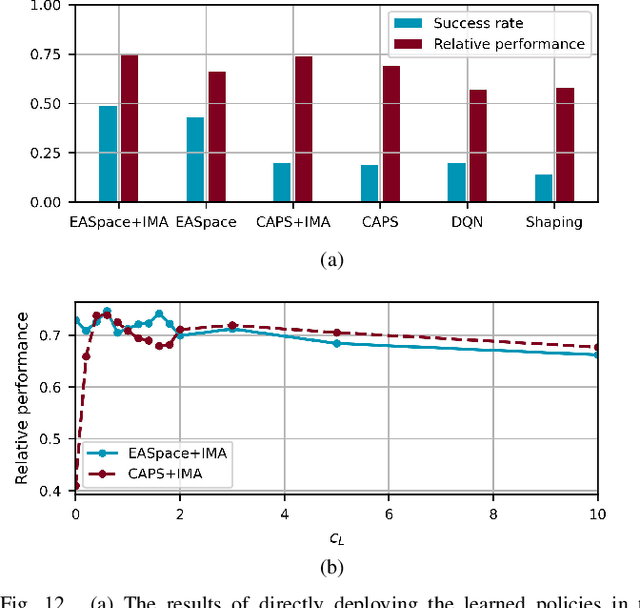
Though transfer learning is promising to increase the learning efficiency, the existing methods are still subject to the challenges from long-horizon tasks, especially when expert policies are sub-optimal and partially useful. Hence, a novel algorithm named EASpace (Enhanced Action Space) is proposed in this paper to transfer the knowledge of multiple sub-optimal expert policies. EASpace formulates each expert policy into multiple macro actions with different execution time period, then integrates all macro actions into the primitive action space directly. Through this formulation, the proposed EASpace could learn when to execute which expert policy and how long it lasts. An intra-macro-action learning rule is proposed by adjusting the temporal difference target of macro actions to improve the data efficiency and alleviate the non-stationarity issue in multi-agent settings. Furthermore, an additional reward proportional to the execution time of macro actions is introduced to encourage the environment exploration via macro actions, which is significant to learn a long-horizon task. Theoretical analysis is presented to show the convergence of the proposed algorithm. The efficiency of the proposed algorithm is illustrated by a grid-based game and a multi-agent pursuit problem. The proposed algorithm is also implemented to real physical systems to justify its effectiveness.