 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarization-driven Semantic Segmentation via Efficient Attention-bridged Fusion
Paper and Code
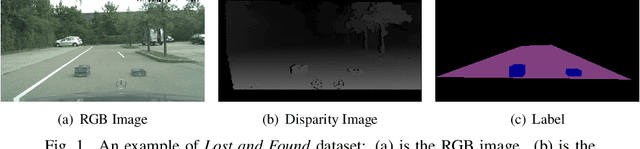
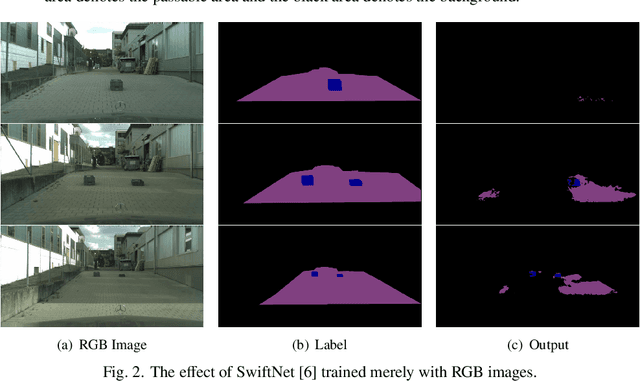
Semantic Segmentation (SS) is promising for outdoor scene perception in safety-critical applications like autonomous vehicles, assisted navigation and so on. However, traditional SS is primarily based on RGB images, which limits the reliability of SS in complex outdoor scenes, where RGB images lack necessary information dimensions to fully perceive unconstrained environments. As preliminary investigation, we examine SS in an unexpected obstacle detection scenario, which demonstrates the necessity of multimodal fusion. Thereby, in this work, we present EAFNet, an Efficient Attention-bridged Fusion Network to exploit complementary information coming from different optical sensors. Specifically, we incorporate polarization sensing to obtain supplementary information, considering its optical characteristics for robust representation of diverse materials. By using a single-shot polarization sensor, we build the first RGB-P dataset which consists of 394 annotated pixel-aligned RGB-Polarization images. A comprehensive variety of experiments shows the effectiveness of EAFNet to fuse polarization and RGB information, as well as the flexibility to be adapted to other sensor combination scenarios.