Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoisson multi-Bernoulli mixture filter: direct derivation and implementation
Paper and Code
Sep 13, 2018
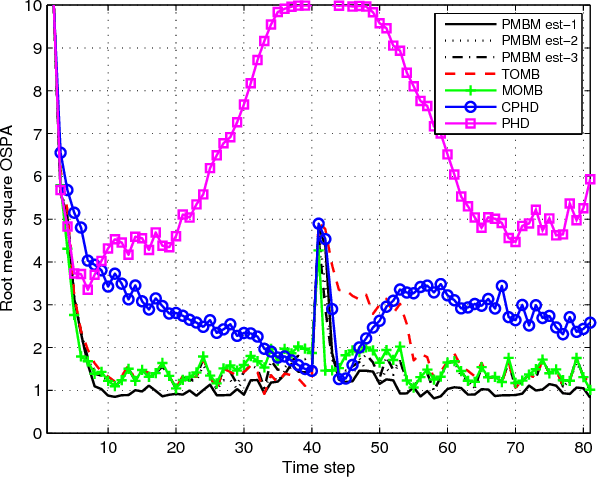
We provide a derivation of the Poisson multi-Bernoulli mixture (PMBM) filter for multi-target tracking with the standard point target measurements without using probability generating functionals or functional derivatives. We also establish the connection with the \delta-generalised labelled multi-Bernoulli (\delta-GLMB) filter, showing that a \delta-GLMB density represents a multi-Bernoulli mixture with labelled targets so it can be seen as a special case of PMBM. In addition, we propose an implementation for linear/Gaussian dynamic and measurement models and how to efficiently obtain typical estimators in the literature from the PMBM. The PMBM filter is shown to outperform other filters in the literature in a challenging scenario.
* IEEE Transactions on Aerospace and Electronic Systems, vol. 54,
no. 4, pp. 1883-1901, Aug. 2018
View paper on