 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointTrackNet: An End-to-End Network For 3-D Object Detection and Tracking From Point Clouds
Paper and Code
Feb 26, 2020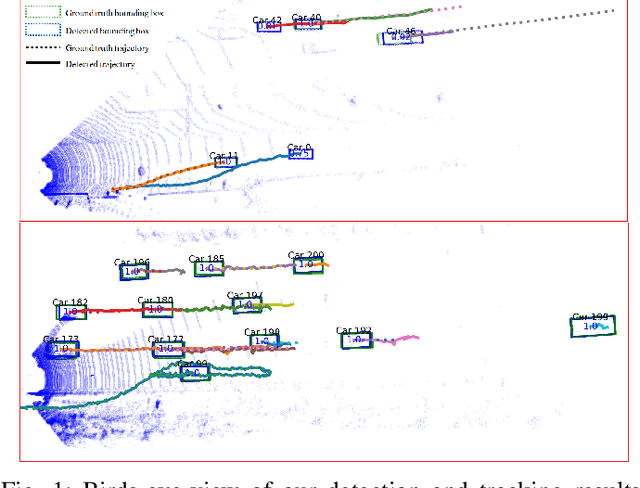
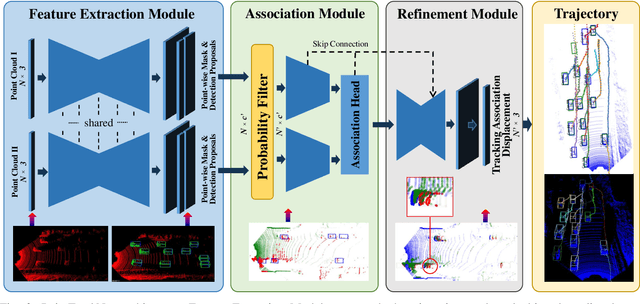
Recent machine learning-based multi-object tracking (MOT) frameworks are becoming popular for 3-D point clouds. Most traditional tracking approaches use filters (e.g., Kalman filter or particle filter) to predict object locations in a time sequence, however, they are vulnerable to extreme motion conditions, such as sudden braking and turning. In this letter, we propose PointTrackNet, an end-to-end 3-D object detection and tracking network, to generate foreground masks, 3-D bounding boxes, and point-wise tracking association displacements for each detected object. The network merely takes as input two adjacent point-cloud frames. Experimental results on the KITTI tracking dataset show competitive results over the state-of-the-arts, especially in the irregularly and rapidly changing scenarios.