 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlueckerNet: Learn to Register 3D Line Reconstructions
Paper and Code


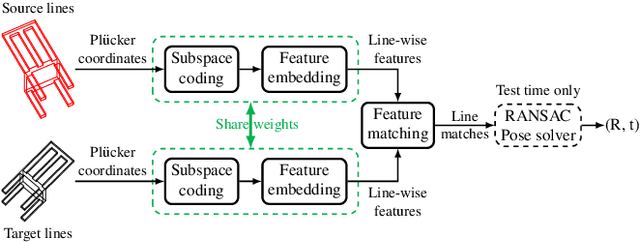
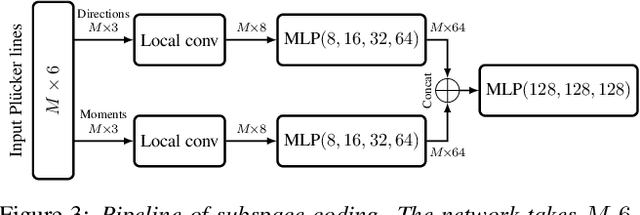
Aligning two partially-overlapped 3D line reconstructions in Euclidean space is challenging, as we need to simultaneously solve correspondences and relative pose between line reconstructions. This paper proposes a neural network based method and it has three modules connected in sequence: (i) a Multilayer Perceptron (MLP) based network takes Pluecker representations of lines as inputs, to extract discriminative line-wise features and matchabilities (how likely each line is going to have a match), (ii) an Optimal Transport (OT) layer takes two-view line-wise features and matchabilities as inputs to estimate a 2D joint probability matrix, with each item describes the matchness of a line pair, and (iii) line pairs with Top-K matching probabilities are fed to a 2-line minimal solver in a RANSAC framework to estimate a six Degree-of-Freedom (6-DoF) rigid transformation. Experiments on both indoor and outdoor datasets show that the registration (rotation and translation) precision of our method outperforms baselines significantly.