Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLG-IN: Pluggable Geometric Consistency Loss with Wasserstein Distance in Monocular Depth Estimation
Paper and Code
Jun 03, 2020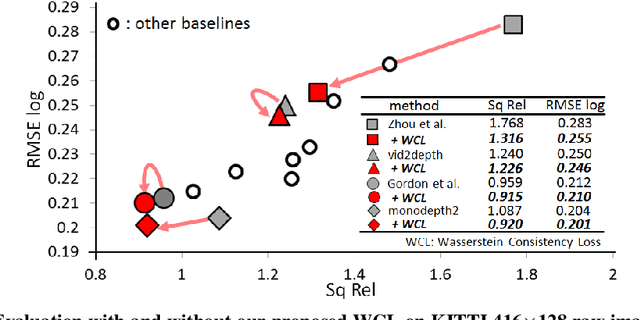
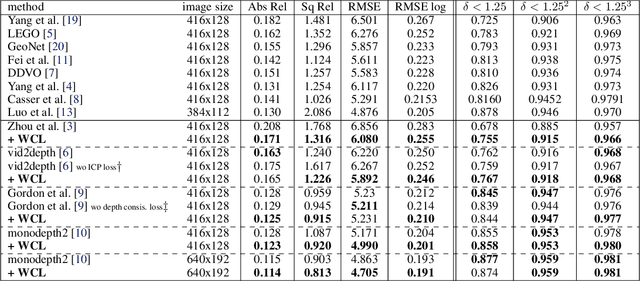

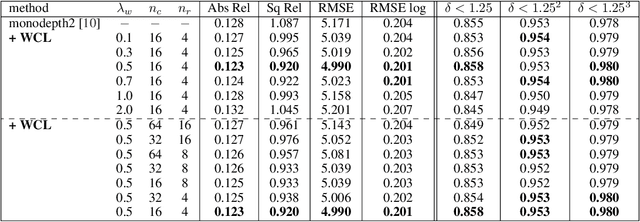
We propose a novel objective to penalize geometric inconsistencies, to improve the performance of depth estimation from monocular camera images. Our objective is designed with the Wasserstein distance between two point clouds estimated from images with different camera poses. The Wasserstein distance can impose a soft and symmetric coupling between two point clouds, which suitably keeps geometric constraints and leads differentiable objective. By adding our objective to the original ones of other state-of-the-art methods, we can effectively penalize a geometric inconsistency and obtain a highly accurate depth estimation. Our proposed method is evaluated on the Eigen split of the KITTI raw dataset.
* 9 pages, 6 figures, 2 tables
View paper on