 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlenoptic Monte Carlo Object Localization for Robot Grasping under Layered Translucency
Paper and Code
Dec 02, 2018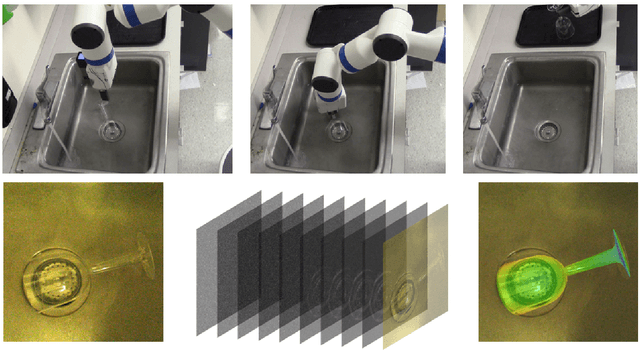
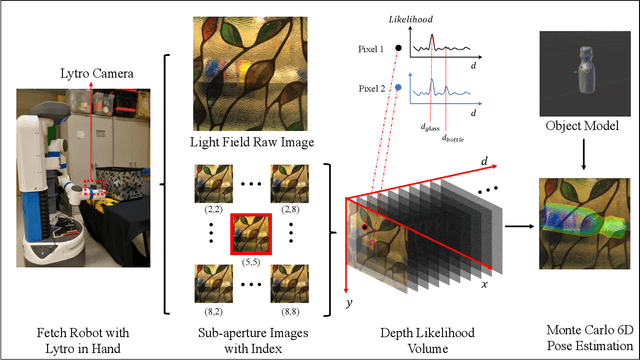
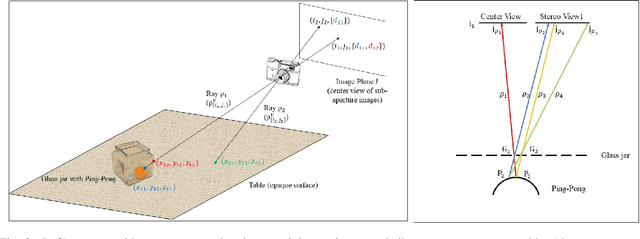
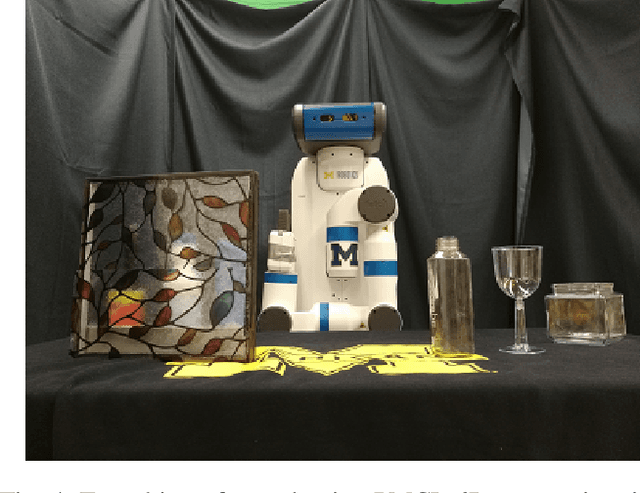
In order to fully function in human environments, robot perception will need to account for the uncertainty caused by translucent materials. Translucency poses several open challenges in the form of transparent objects (e.g., drinking glasses), refractive media (e.g., water), and diffuse partial occlusions (e.g., objects behind stained glass panels). This paper presents Plenoptic Monte Carlo Localization (PMCL) as a method for localizing object poses in the presence of translucency using plenoptic (light-field) observations. We propose a new depth descriptor, the Depth Likelihood Volume (DLV), and its use within a Monte Carlo object localization algorithm. We present results of localizing and manipulating objects with translucent materials and objects occluded by layers of translucency. Our PMCL implementation uses observations from a Lytro first generation light field camera to allow a Michigan Progress Fetch robot to perform grasping.