 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Spatial Networks
Paper and Code
Jun 12, 2021
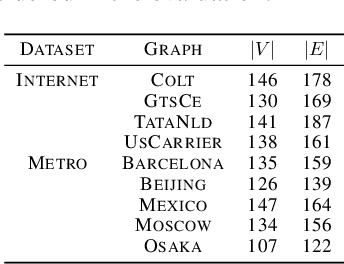
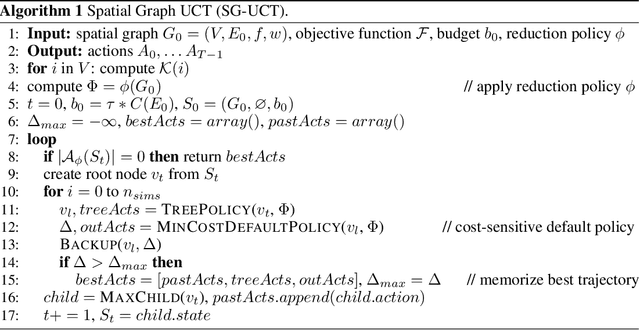
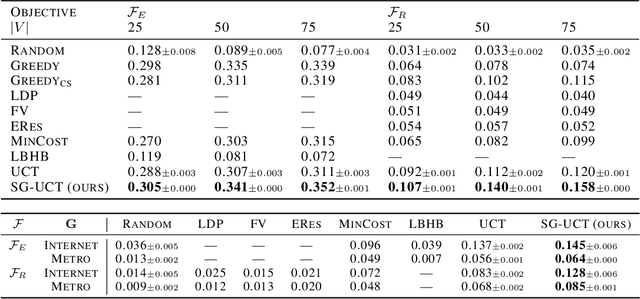
We tackle the problem of goal-directed graph construction: given a starting graph, a global objective function (e.g., communication efficiency), and a budget of modifications, the aim is to find a set of edges whose addition to the graph maximally improves the objective. This problem emerges in many networks of great importance for society such as transportation and critical infrastructure networks. We identify two significant shortcomings with present methods. Firstly, they focus exclusively on network topology while ignoring spatial information; however, in many real-world networks, nodes are embedded in space, which yields different global objectives and governs the range and density of realizable connections. Secondly, existing RL methods scale poorly to large networks due to the high cost of training a model and the scaling factors of the action space and global objectives. In this work, we formulate the problem of goal-directed construction of spatial networks as a deterministic MDP. We adopt the Monte Carlo Tree Search framework for planning in this domain, prioritizing the optimality of final solutions over the speed of policy evaluation. We propose several improvements over the standard UCT algorithm for this family of problems, addressing their single-agent nature, the trade-off between the costs of edges and their contribution to the objective, and an action space linear in the number of nodes. We demonstrate the suitability of this approach for improving the global efficiency and attack resilience of a variety of synthetic and real-world networks, including Internet backbone networks and metro systems. We obtain 24% better solutions on average compared to UCT on the largest networks tested, and scalability superior to previous methods.