 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaneRecNet: Multi-Task Learning with Cross-Task Consistency for Piece-Wise Plane Detection and Reconstruction from a Single RGB Image
Paper and Code
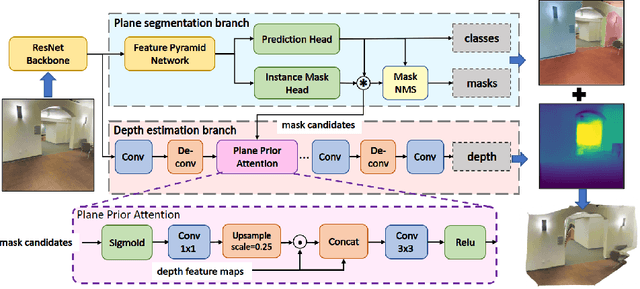

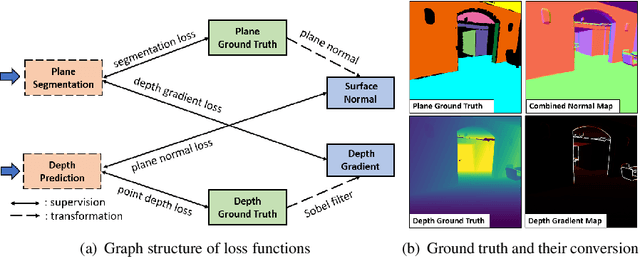

Piece-wise 3D planar reconstruction provides holistic scene understanding of man-made environments, especially for indoor scenarios. Most recent approaches focused on improving the segmentation and reconstruction results by introducing advanced network architectures but overlooked the dual characteristics of piece-wise planes as objects and geometric models. Different from other existing approaches, we start from enforcing cross-task consistency for our multi-task convolutional neural network, PlaneRecNet, which integrates a single-stage instance segmentation network for piece-wise planar segmentation and a depth decoder to reconstruct the scene from a single RGB image. To achieve this, we introduce several novel loss functions (geometric constraint) that jointly improve the accuracy of piece-wise planar segmentation and depth estimation. Meanwhile, a novel Plane Prior Attention module is used to guide depth estimation with the awareness of plane instances. Exhaustive experiments are conducted in this work to validate the effectiveness and efficiency of our method.