 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlane Pair Matching for Efficient 3D View Registration
Paper and Code
Jan 20, 2020
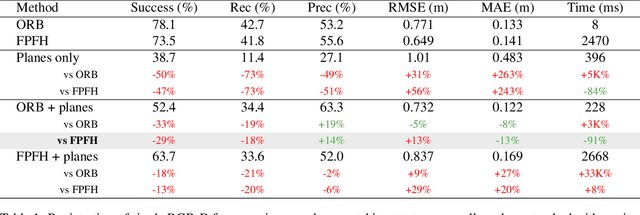


We present a novel method to estimate the motion matrix between overlapping pairs of 3D views in the context of indoor scenes. We use the Manhattan world assumption to introduce lightweight geometric constraints under the form of planes into the problem, which reduces complexity by taking into account the structure of the scene. In particular, we define a stochastic framework to categorize planes as vertical or horizontal and parallel or non-parallel. We leverage this classification to match pairs of planes in overlapping views with point-of-view agnostic structural metrics. We propose to split the motion computation using the classification and estimate separately the rotation and translation of the sensor, using a quadric minimizer. We validate our approach on a toy example and present quantitative experiments on a public RGB-D dataset, comparing against recent state-of-the-art methods. Our evaluation shows that planar constraints only add low computational overhead while improving results in precision when applied after a prior coarse estimate. We conclude by giving hints towards extensions and improvements of current results.