 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanar Manipulation via Learning Regrasping
Paper and Code
Oct 11, 2022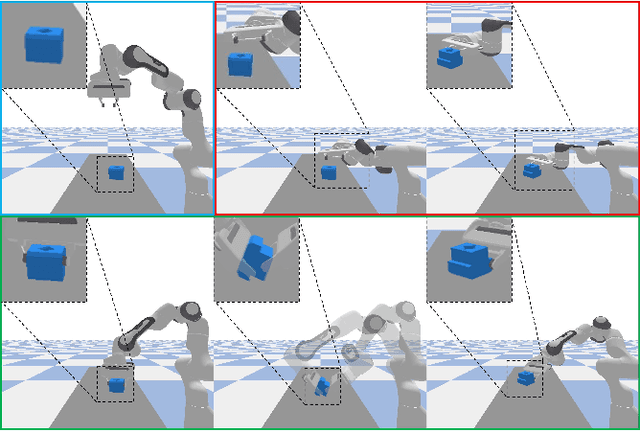
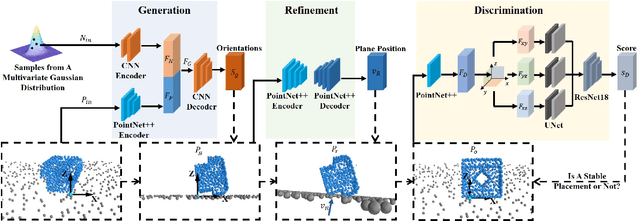

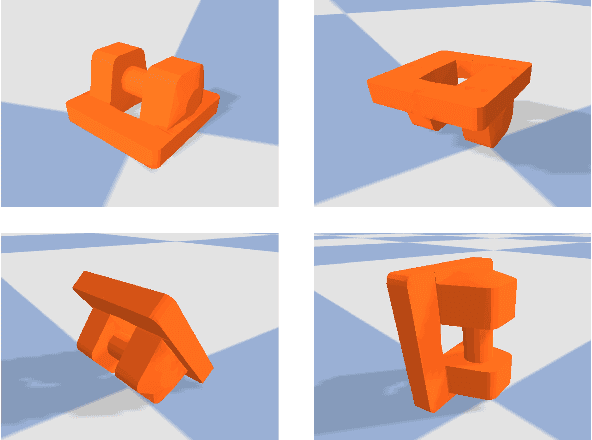
Regrasping is important for robots to reorient objects in planar manipulation tasks. Different placements of objects can provide robots with alternative grasp configurations, which are used in complex planar manipulation tasks that require multiple pick-rotate-and-place steps due to the constraints of the environment and robot kinematic constraints. In this work, our goal is to generate diverse placements of objects on the plane using deep neural networks. We propose a pipeline with the stages of orientation generation, position refinement, and placement discrimination to obtain accurate and diverse stable placements based on the perception of point clouds. A large-scale dataset is created for training, including simulated placements and contact information between objects and the plane. The simulation results show that our pipeline outperforms the start-of-the-art, achieving an accuracy rate of 90% and a diversity rate of 80% in simulation on generated placements. Our pipeline is also validated in real-robot experiments. With the generated placements, sequential pick-rotate-and-place steps are calculated for the robot to reorient objects to goal poses that are not reachable within one step. Videos and dataset are available at https://sites.google.com/view/pmvlr2022/.