 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlan Arithmetic: Compositional Plan Vectors for Multi-Task Control
Paper and Code
Oct 30, 2019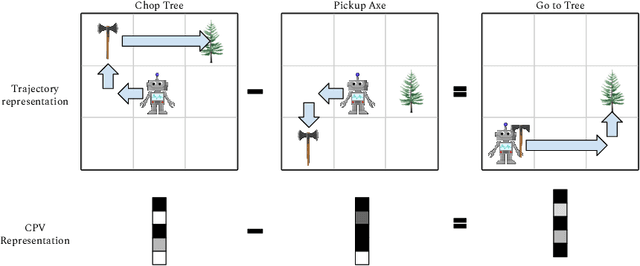
Autonomous agents situated in real-world environments must be able to master large repertoires of skills. While a single short skill can be learned quickly, it would be impractical to learn every task independently. Instead, the agent should share knowledge across behaviors such that each task can be learned efficiently, and such that the resulting model can generalize to new tasks, especially ones that are compositions or subsets of tasks seen previously. A policy conditioned on a goal or demonstration has the potential to share knowledge between tasks if it sees enough diversity of inputs. However, these methods may not generalize to a more complex task at test time. We introduce compositional plan vectors (CPVs) to enable a policy to perform compositions of tasks without additional supervision. CPVs represent trajectories as the sum of the subtasks within them. We show that CPVs can be learned within a one-shot imitation learning framework without any additional supervision or information about task hierarchy, and enable a demonstration-conditioned policy to generalize to tasks that sequence twice as many skills as the tasks seen during training. Analogously to embeddings such as word2vec in NLP, CPVs can also support simple arithmetic operations -- for example, we can add the CPVs for two different tasks to command an agent to compose both tasks, without any additional training.