 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePL-EVIO: Robust Monocular Event-based Visual Inertial Odometry with Point and Line Features
Paper and Code
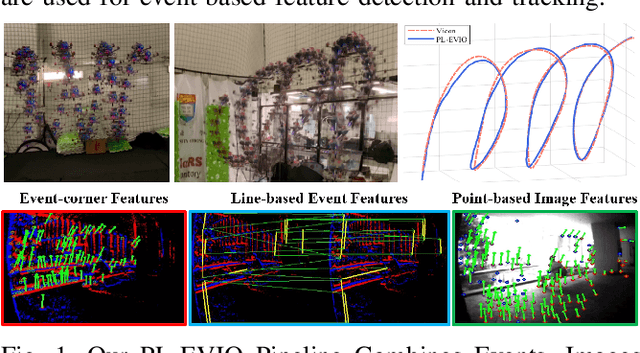


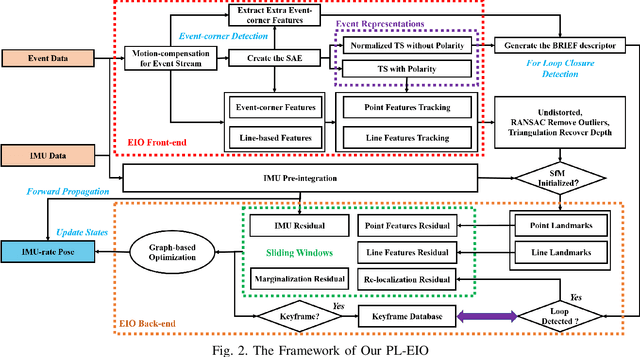
Event cameras are motion-activated sensors that capture pixel-level illumination changes instead of the intensity image with a fixed frame rate. Compared with the standard cameras, it can provide reliable visual perception during high-speed motions and in high dynamic range scenarios. However, event cameras output only a little information or even noise when the relative motion between the camera and the scene is limited, such as in a still state. While standard cameras can provide rich perception information in most scenarios, especially in good lighting conditions. These two cameras are exactly complementary. In this paper, we proposed a robust, high-accurate, and real-time optimization-based monocular event-based visual-inertial odometry (VIO) method with event-corner features, line-based event features, and point-based image features. The proposed method offers to leverage the point-based features in the nature scene and line-based features in the human-made scene to provide more additional structure or constraints information through well-design feature management. Experiments in the public benchmark datasets show that our method can achieve superior performance compared with the state-of-the-art image-based or event-based VIO. Finally, we used our method to demonstrate an onboard closed-loop autonomous quadrotor flight and large-scale outdoor experiments. Videos of the evaluations are presented on our project website: https://b23.tv/OE3QM6j