 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-Wise Motion Deblurring of Thermal Videos
Paper and Code
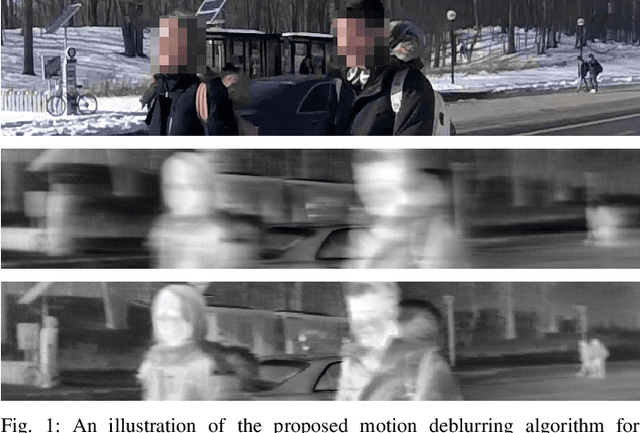

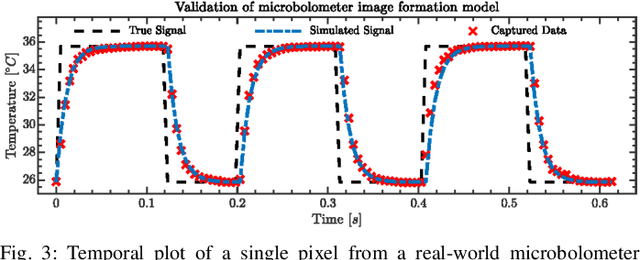
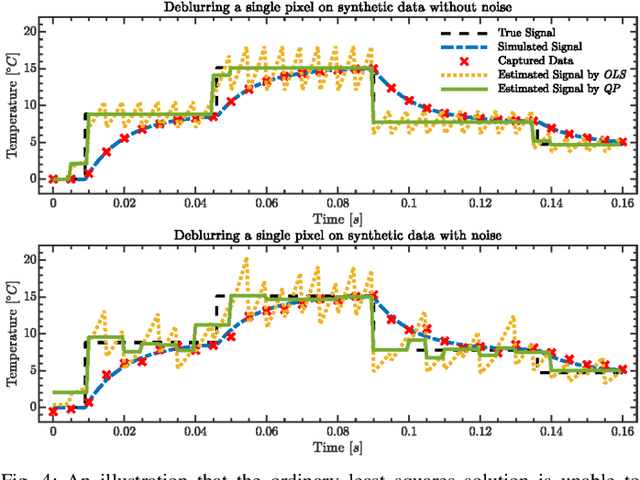
Uncooled microbolometers can enable robots to see in the absence of visible illumination by imaging the "heat" radiated from the scene. Despite this ability to see in the dark, these sensors suffer from significant motion blur. This has limited their application on robotic systems. As described in this paper, this motion blur arises due to the thermal inertia of each pixel. This has meant that traditional motion deblurring techniques, which rely on identifying an appropriate spatial blur kernel to perform spatial deconvolution, are unable to reliably perform motion deblurring on thermal camera images. To address this problem, this paper formulates reversing the effect of thermal inertia at a single pixel as a Least Absolute Shrinkage and Selection Operator (LASSO) problem which we can solve rapidly using a quadratic programming solver. By leveraging sparsity and a high frame rate, this pixel-wise LASSO formulation is able to recover motion deblurred frames of thermal videos without using any spatial information. To compare its quality against state-of-the-art visible camera based deblurring methods, this paper evaluated the performance of a family of pre-trained object detectors on a set of images restored by different deblurring algorithms. All evaluated object detectors performed systematically better on images restored by the proposed algorithm rather than any other tested, state-of-the-art methods.