 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePiezoelectric Soft Robot Inchworm Motion by Controlling Ground Friction through Robot Shape
Paper and Code
Nov 01, 2021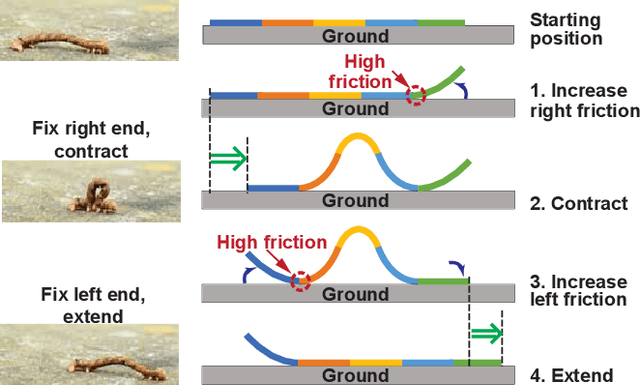
Electrically driven soft robots enable small and light bodies, as well as environmental compatibility, various locomotion, and safe operation. In particular, electrostatic actuators (for example, piezoelectric actuators) are fast responded. However, scalable ways for seamless integration and untethered operation remain unclear. In addition, soft body nature modeling, including environmental interactions, is a long-standing challenge. Furthermore, more locomotion mechanisms need to be explored. In this paper, we have designed, modeled, and demonstrated a soft robot that, for the first time, starts to address all these questions. It has a linear array of five actuators in a planar structure, opening doors for integration and free operation. A new inchworm-inspired crawling motion mechanism was designed and validated by relying on posture self-adjustment. The first analytical soft body model including piezoelectricity, gravity, and ground interactions that well explain robot locomotion was developed and validated by experiments. We demonstrated the robot's forward and backward motion and explored the effects of payload and driving speed: 1.2 mm movement per cycle and up to 200 g payload (16x body weight) can be carried while moving. This work paves the way for fast-responding robots in complicated unknown environments.