 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized On-line Adaptation of Kinematic Synergies for Human-Prosthesis Interfaces
Paper and Code
Feb 19, 2019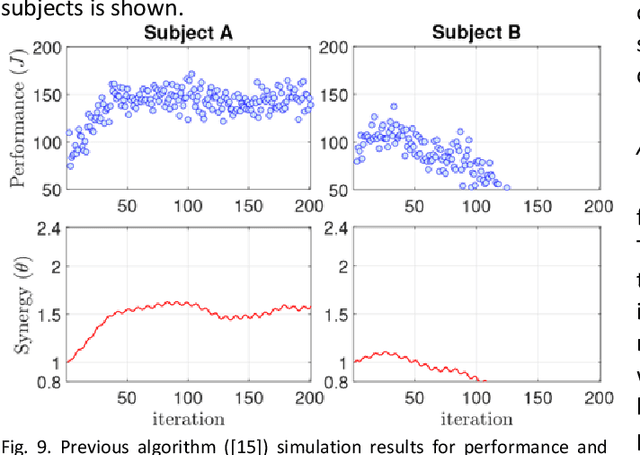
Synergies have been adopted in prosthetic limb applications to reduce complexity of design, but typically involve a single synergy setting for a population and ignore individual preference or adaptation capacity. In this paper, a systematic design of kinematic synergies for human-prosthesis interfaces using on-line measurements from each individual is proposed. The task of reaching using the upper-limb is described by an objective function and the interface is parameterized by a kinematic synergy. Consequently, personalizing the interface for a given individual can be formulated as finding an optimal personalized parameter. A structure to model the observed motor behavior that allows for the personalized traits of motor preference and motor learning is proposed, and subsequently used in an on-line optimization scheme to identify the synergies for an individual. The knowledge of the common features contained in the model enables on-line adaptation of the human-prosthesis interface to happen concurrently to human motor adaptation without the need to re-tune the parameters of the on-line algorithm for each individual. Human-in-the-loop experimental results with able-bodied subjects, performed in a virtual reality environment to emulate amputation and prosthesis use, show that the proposed personalization algorithm was effective in obtaining optimal synergies with a fast uniform convergence speed across a group of individuals.