 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Guarantees for Spectral Initialization in Rotation Averaging and Pose-Graph SLAM
Paper and Code
Jan 11, 2022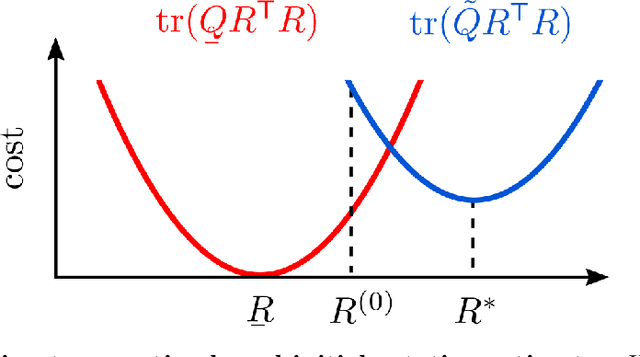
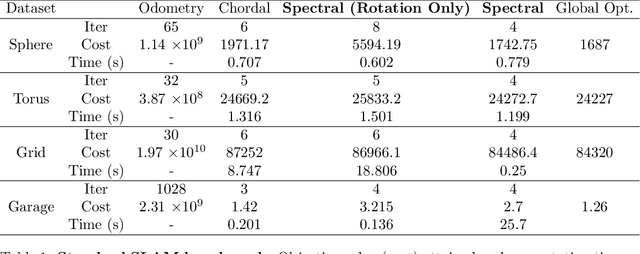
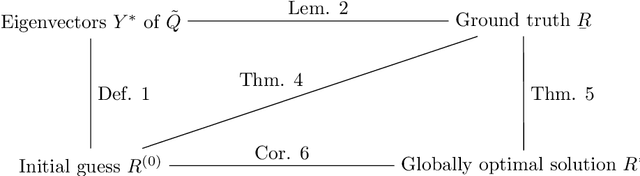
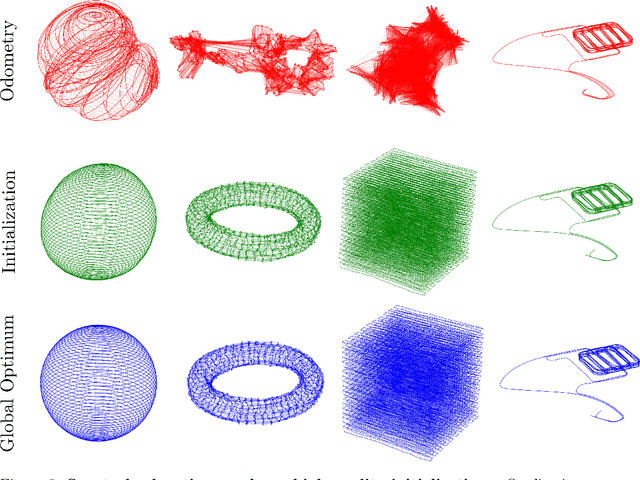
In this work we present the first initialization methods equipped with explicit performance guarantees adapted to the pose-graph simultaneous localization and mapping (SLAM) and rotation averaging (RA) problems. SLAM and rotation averaging are typically formalized as large-scale nonconvex point estimation problems, with many bad local minima that can entrap the smooth optimization methods typically applied to solve them; the performance of standard SLAM and RA algorithms thus crucially depends upon the quality of the estimates used to initialize this local search. While many initialization methods for SLAM and RA have appeared in the literature, these are typically obtained as purely heuristic approximations, making it difficult to determine whether (or under what circumstances) these techniques can be reliably deployed. In contrast, in this work we study the problem of initialization through the lens of spectral relaxation. Specifically, we derive a simple spectral relaxation of SLAM and RA, the form of which enables us to exploit classical linear-algebraic techniques (eigenvector perturbation bounds) to control the distance from our spectral estimate to both the (unknown) ground-truth and the global minimizer of the estimation problem as a function of measurement noise. Our results reveal the critical role that spectral graph-theoretic properties of the measurement network play in controlling estimation accuracy; moreover, as a by-product of our analysis we obtain new bounds on the estimation error for the maximum likelihood estimators in SLAM and RA, which are likely to be of independent interest. Finally, we show experimentally that our spectral estimator is very effective in practice, producing initializations of comparable or superior quality at lower computational cost compared to existing state-of-the-art techniques.