 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceptual Attention-based Predictive Control
Paper and Code
Apr 26, 2019

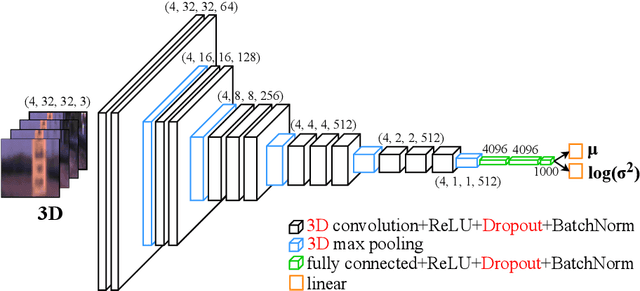
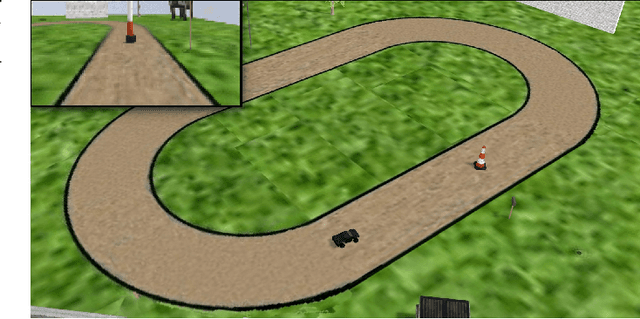
In this paper, we present a novel information processing architecture for end-to-end visual navigation of autonomous systems. The proposed information processing architecture is used to support a perceptual attention-based predictive control algorithm that leverages model predictive control, convolutional neural networks and uncertainty quantification methods. The key idea relies on using model predictive control to train convolutional neural networks to predict regions of interest in the input visual information. These regions of interest are then used as input to the Macula-Network, a 3D convolutional neural network that is trained to produce control actions as well as estimates of epistemic and aleatoric uncertainty in the incoming stream of data. The proposed architecture is tested on simulated examples and a 1:5 scale terrestrial vehicle. Experimental results show that the proposed architecture outperforms previous approaches on early detection of novel object/data which are outside of the initial training set. The proposed architecture is a first step towards using end-to-end perceptual control policies in safety-critical domains.