 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-aware receding horizon trajectory planning for multicopters with visual-inertial odometry
Paper and Code
Apr 07, 2022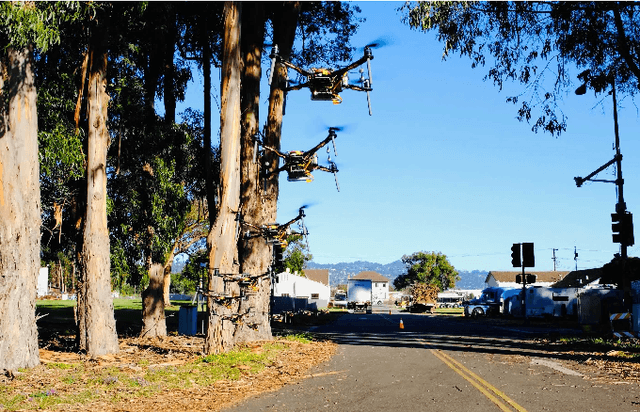
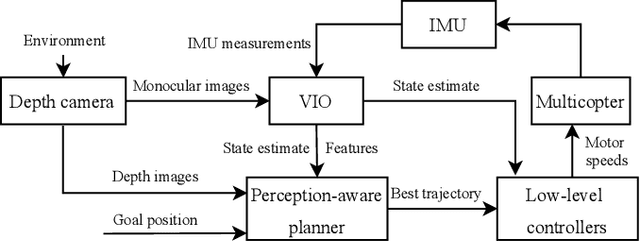
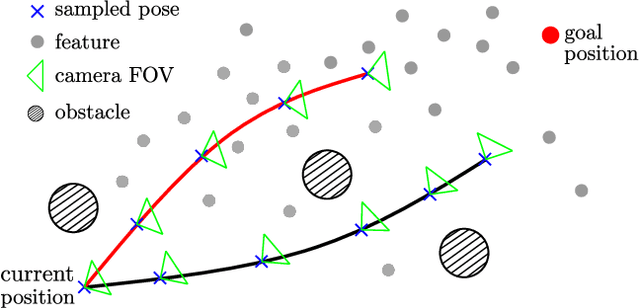
Visual inertial odometry (VIO) is widely used for the state estimation of multicopters, but it may function poorly in environments with few visual features or in overly aggressive flights. In this work, we propose a perception-aware collision avoidance local planner for multicopters. Our approach is able to fly the vehicle to a goal position at high speed, avoiding obstacles in the environment while achieving good VIO state estimation accuracy. The proposed planner samples a group of minimum jerk trajectories and finds collision-free trajectories among them, which are then evaluated based on their speed to the goal and perception quality. Both the features' motion blur and their locations are considered for the perception quality. The best trajectory from the evaluation is tracked by the vehicle and is updated in a receding horizon manner when new images are received from the camera. All the sampled trajectories have zero speed and acceleration at the end, and the planner assumes no other visual features except those already found by the VIO. As a result, the vehicle will follow the current trajectory to the end and stop safely if no new trajectories are found, avoiding collision or flying into areas without features. The proposed method can run in real time on a small embedded computer on board. We validated the effectiveness of our proposed approach through experiments in indoor and outdoor environments. Compared to a perception-agnostic planner, the proposed planner kept more features in the camera's view and made the flight less aggressive, making the VIO more accurate. It also reduced VIO failures, which occurred for the perception-agnostic planner but not for the proposed planner. The experiment video can be found at https://youtu.be/LjZju4KEH9Q.