 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Dead Reckoning System using Quasi-static Magnetic Field Detection
Paper and Code
Jan 25, 2022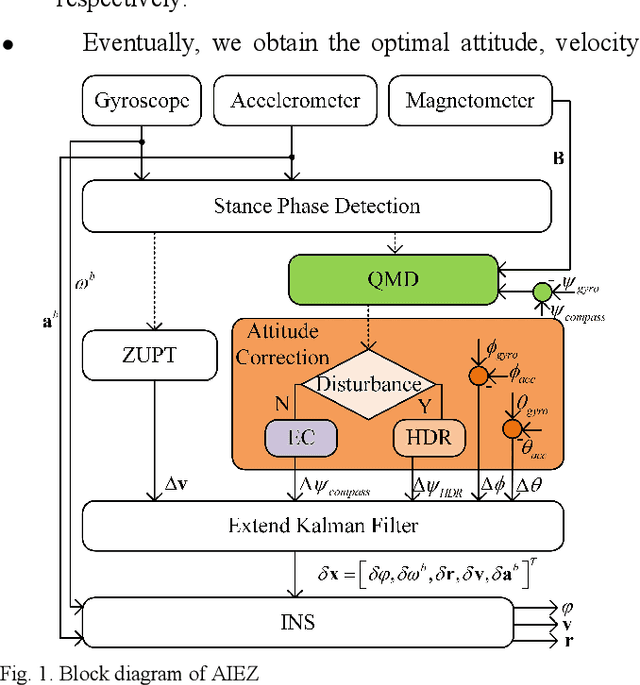
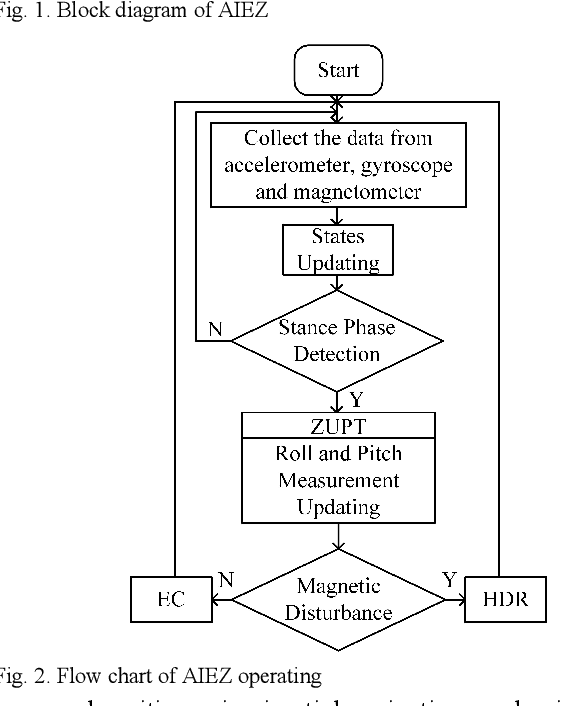
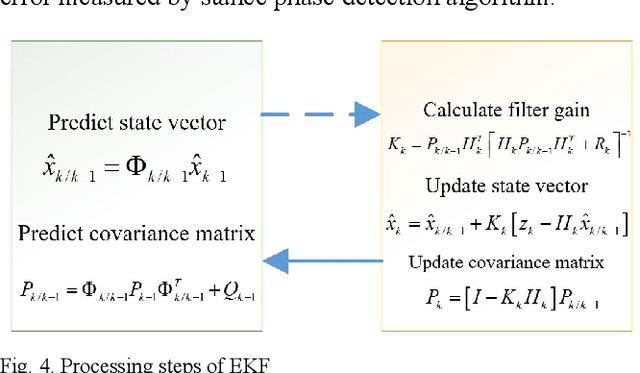
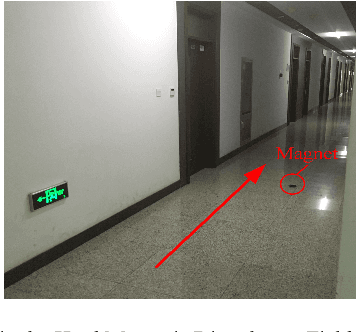
Kalman filter-based Inertial Navigation System (INS) is a reliable and efficient method to estimate the position of a pedestrian indoors. Classical INS-based methodology which is called IEZ (INS-EKF-ZUPT) makes use of an Extended Kalman Filter (EKF), a Zero velocity UPdaTing (ZUPT) to calculate the position and attitude of a person. However, heading error which is a key factor of the whole Pedestrian Dead Reckoning (PDR) system is unobservable for IEZ-based PDR system. To minimize the error, Electronic Com-pass (EC) algorithm becomes a valid method. But magnetic disturbance may have a big negative effect on it. In this paper, the Quasi-static Magnetic field Detection (QMD) method is proposed to detect the pure magnetic field and then selects EC algorithm or Heuristic heading Drift Reduction algorithm (HDR) according to the detection result, which implements the complementation of the two methods. Meanwhile, the QMD, EC, and HDR algorithms are integrated into the IEZ framework to form a new PDR solution which is named Advanced IEZ (AIEZ).