 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedagogical Demonstrations and Pragmatic Learning in Artificial Tutor-Learner Interactions
Paper and Code
Feb 28, 2022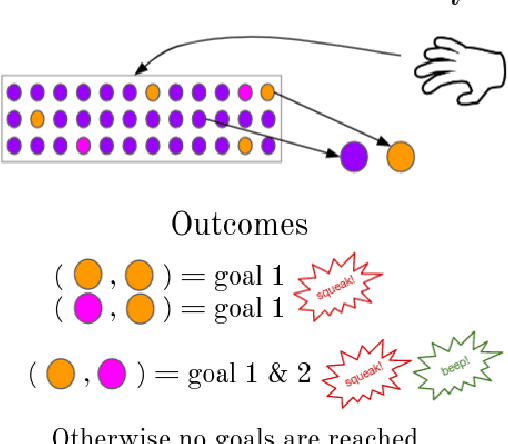
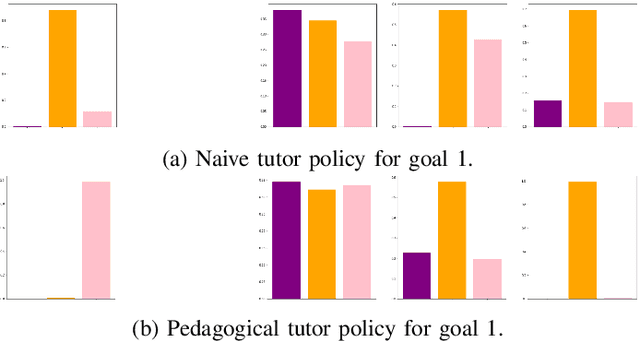
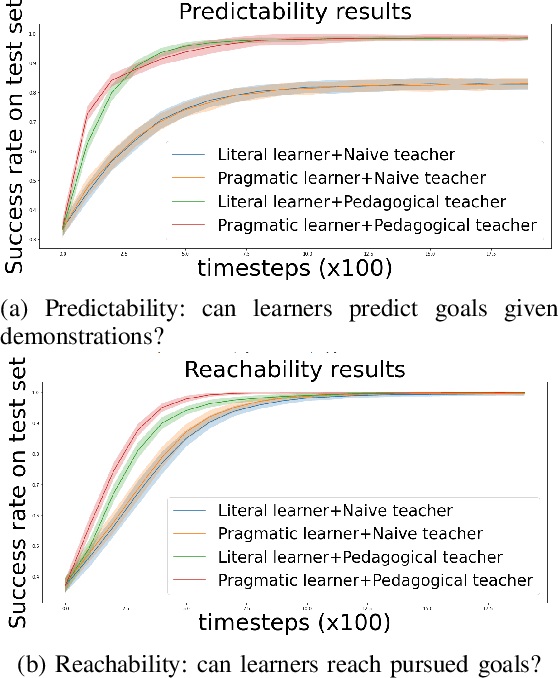
When demonstrating a task, human tutors pedagogically modify their behavior by either "showing" the task rather than just "doing" it (exaggerating on relevant parts of the demonstration) or by giving demonstrations that best disambiguate the communicated goal. Analogously, human learners pragmatically infer the communicative intent of the tutor: they interpret what the tutor is trying to teach them and deduce relevant information for learning. Without such mechanisms, traditional Learning from Demonstration (LfD) algorithms will consider such demonstrations as sub-optimal. In this paper, we investigate the implementation of such mechanisms in a tutor-learner setup where both participants are artificial agents in an environment with multiple goals. Using pedagogy from the tutor and pragmatism from the learner, we show substantial improvements over standard learning from demonstrations.