 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePCGen: Point Cloud Generator for LiDAR Simulation
Paper and Code
Oct 17, 2022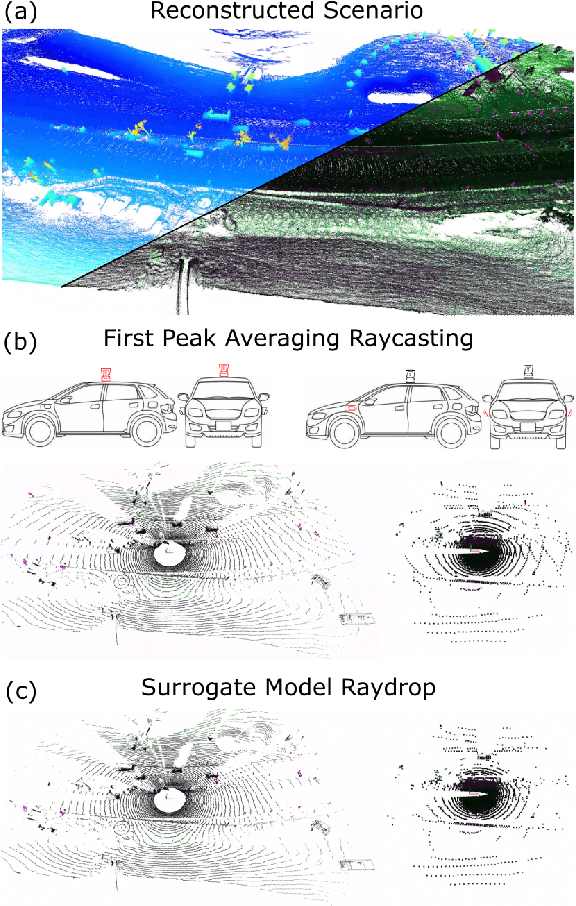
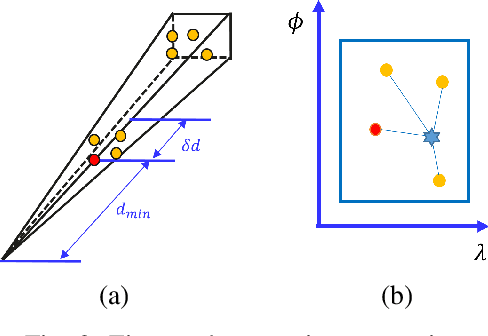
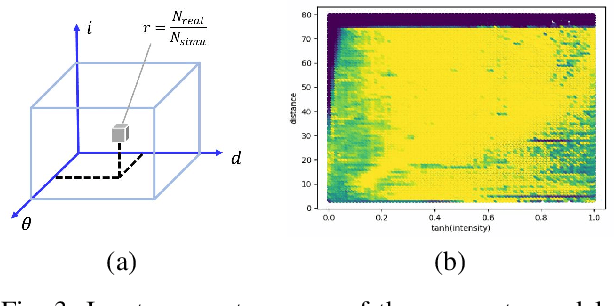
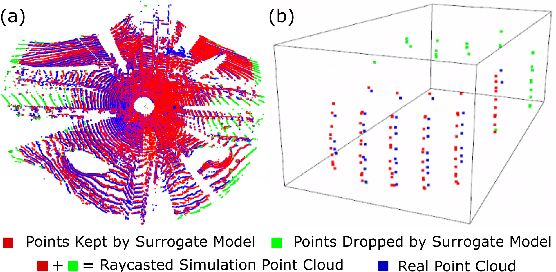
Data is a fundamental building block for LiDAR perception systems. Unfortunately, real-world data collection and annotation is extremely costly & laborious. Recently, real data based LiDAR simulators have shown tremendous potential to complement real data, due to their scalability and high-fidelity compared to graphics engine based methods. Before simulation can be deployed in the real-world, two shortcomings need to be addressed. First, existing methods usually generate data which are more noisy and complete than the real point clouds, due to 3D reconstruction error and pure geometry-based raycasting method. Second, prior works on simulation for object detection focus solely on rigid objects, like cars, but VRUs, like pedestrians, are important road participants. To tackle the first challenge, we propose FPA raycasting and surrogate model raydrop. FPA enables the simulation of both point cloud coordinates and sensor features, while taking into account reconstruction noise. The ray-wise surrogate raydrop model mimics the physical properties of LiDAR's laser receiver to determine whether a simulated point would be recorded by a real LiDAR. With minimal training data, the surrogate model can generalize to different geographies and scenes, closing the domain gap between raycasted and real point clouds. To tackle the simulation of deformable VRU simulation, we employ SMPL dataset to provide a pedestrian simulation baseline and compare the domain gap between CAD and reconstructed objects. Applying our pipeline to perform novel sensor synthesis, results show that object detection models trained by simulation data can achieve similar result as the real data trained model.