 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle MPC for Uncertain and Learning-Based Control
Paper and Code
Apr 13, 2021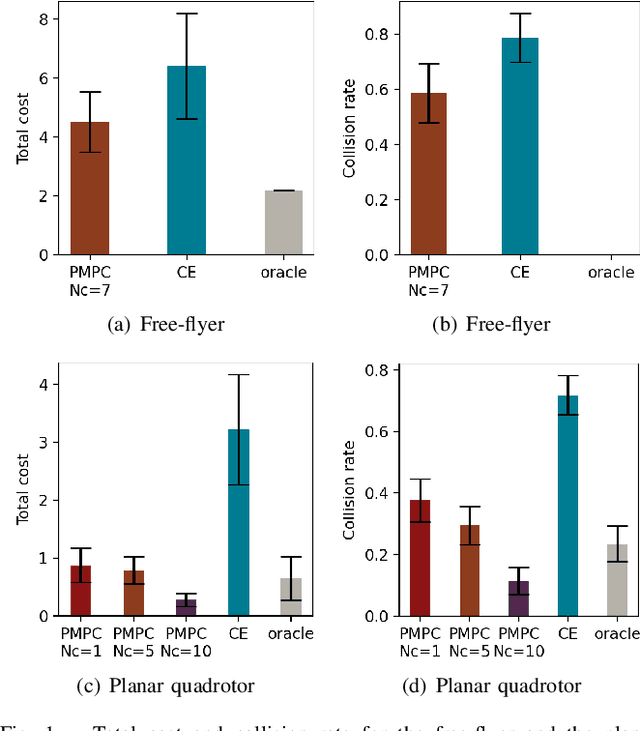


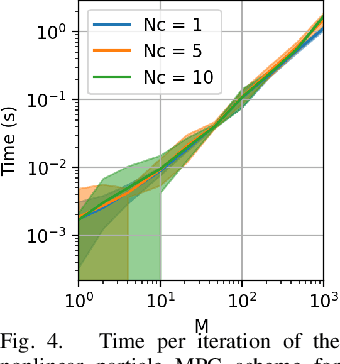
As robotic systems move from highly structured environments to open worlds, incorporating uncertainty from dynamics learning or state estimation into the control pipeline is essential for robust performance. In this paper we present a nonlinear particle model predictive control (PMPC) approach to control under uncertainty, which directly incorporates any particle-based uncertainty representation, such as those common in robotics. Our approach builds on scenario methods for MPC, but in contrast to existing approaches, which either constrain all or only the first timestep to share actions across scenarios, we investigate the impact of a \textit{partial consensus horizon}. Implementing this optimization for nonlinear dynamics by leveraging sequential convex optimization, our approach yields an efficient framework that can be tuned to the particular information gain dynamics of a system to mitigate both over-conservatism and over-optimism. We investigate our approach for two robotic systems across three problem settings: time-varying, partially observed dynamics; sensing uncertainty; and model-based reinforcement learning, and show that our approach improves performance over baselines in all settings.